|
-
Graphic HMI for Logic and Control Design
-
Powerful and Adjustable Development Platform
-
High-Precision Measurements Sensor
-
Semi-Physical Embedded Simulation
-
High-Speed Data Acquisition
-
Rich User Equipment Interface
-
For Fixed-wing, Helicopter, Copter, VTOL, Car, Boats,
Robot etc.
|
 |
Overview
|
CCA42
multifunctional graphical programmable flight control
system. The control law construction software is similar to
MATLAB and Simulink. No need to write code, just simply
operate the mouse to connect the related functional modules,
you can build the flight control system schemes with
intuitive and clear structure and flow.
The built-in JSBSim and FlightGear semi-physical simulation
systems can be used for system identification, dynamic
simulation, online parameter adjustment and real-time
operation. Your flight control system can quickly complete
from design and development to real application.
You can use the professional function modules provided by
the software, and also able to create custom control modules
by C programming language. Users can carry out
project development and application expansion according to
their individual needs. It can be used for Fixed-wing,
Helicopter, VTOL, Multi-rotor, Tilt-rotor, Airship, Car,
Boats, Robot, PTZ and Moving Vehicle, etc. |
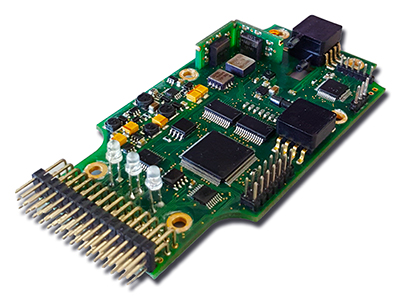
Device Structure
-
3-axis angular rate gyro, 3-axis accelerometer, 3-axis
magnetometer
-
Airspeed Sensor
-
Barometric Altimeter
-
10Hz
GPS, GLONASS, BeiDou, Galileo Satellite Receiver
-
DSP Digital signal processor, CPLD, 24 bit ADC
-
16 Channel CAN Aerospace Device Expansion Bus
-
Redundant Power Supply
-
18 Channel PPM Control Signal Input
-
18 Channel Servo Output
-
2 Channel Voltage Monitoring
-
2 Channel RPM Monitoring
-
8G External USB High-Speed Flight Data Recorder
|
 |
Features
-
The use of graphical
configuration modeling technology to quickly build a powerful
flight control system.
-
Fixed Wing,
Copter
Dual Mode High Accuracy Dynamic 3D Attitude Algorithm.
-
Provide more than 90
measurement data, the maximum rate of 50Hz.
-
AHRS and GPS-INS
inertial integrated navigation algorithm.
-
Excellent broadband seismic characteristics, can be used for a
variety of harsh environments.
-
Ziegler - Nichols step
and frequency response of two PID controller parameter setter.
-
JSBSim flight dynamics
model and FlightGear flight simulator composed of semi-physical
simulation system.
-
CAN Aerospace protocol device expansion bus, access to a variety
of user devices and sensors.
-
Security and confidentiality design, internal
data can only be written can not be read and exported.
-
Convenient and flexible navigation control, any route from any
point anytime you want to start flying.
-
A variety of flight modes: smart seamless tracking mode,
waypoint resident mode, pointing mode and so on.
-
The flight plan can be composed of a number of routes, the max
capacity of 100 routes, support KML route file.
-
Each route can be set up 1000 waypoints, each waypoint can
define 23 parameters and 18 task operations.
-
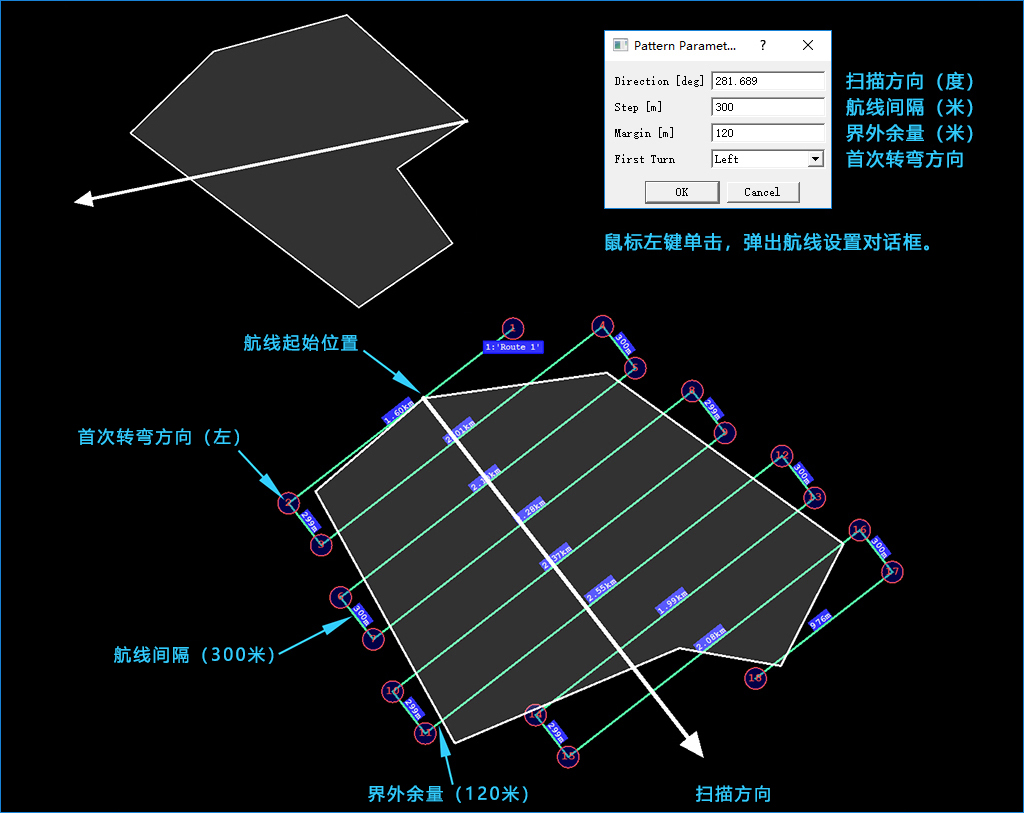
Polygon scan route, you can define route scanning direction,
route interval, margin, turn direction and so on.
-
Available online maps:
Google Road, Hybrid, Satellite, Terrain Map, Open Street Map
-
Custom meter display, custom operation buttons and interactive
window.
-
Video overlay, base station GPS, flight history playback,
missing plane search and more.
-
Multi-function
professional flight data analysis software.
-
Flight control
software interface custom LOGO.
Specification
|
Physical |
|
I/O |
|
|
size |
:115x65x23mm |
PWM output |
: 6 channel
|
|
weight |
:120g |
PPM output |
:12 channel
|
|
Electrical |
|
PPM input |
:18 channel
|
|
Voltage |
:DC 4V~18V |
Interface |
|
|
Current |
:220mA@6V |
Sin input |
:1 (18 channel)
|
|
Power |
:1.32W |
Sout output |
:1 (12 channel)
|
|
Accuracy |
|
CAN |
:1 (16 channel)
|
|
Attitude |
:Pitch
0.1°/±90°,Roll
0.1°/±180°,Course
0.3°/±180° |
RS232-1 |
:PC / Digital
Radio
|
|
Position |
:2.5m |
RS232-2 |
:RTK /
LiDAR / Simulation
|
|
Range |
|
Voltage survey |
:2 (0~30V)
|
|
Angular |
:±300°/s |
RPM survey |
:2 |
|
Acceleration |
:±2g
/ ±8g |
Route/WP |
|
|
Altitude |
:-1000m~11000m |
Route |
:100
|
|
Airspeed |
:0~300km/hr
or 0~500km/hr |
Waypoint |
:1000 / route
|
|
GPS |
|
Set |
:23 parameters /
18 action
|
|
Type |
:Ublox
MAX-M8Q |
Online Map |
|
|
System |
:GPS,
GLONASS, BeiDou, Galileo |
Google |
:Road,
Hybrid, Satellite, Terrain Map |
|
Rate |
:10Hz |
Open |
:Open Street Map |
|
Environment |
|
Data Recorder |
|
|
Temperature |
:-25°C~+70°C
|
Capacity |
:8G / USB / High
Speed / External |
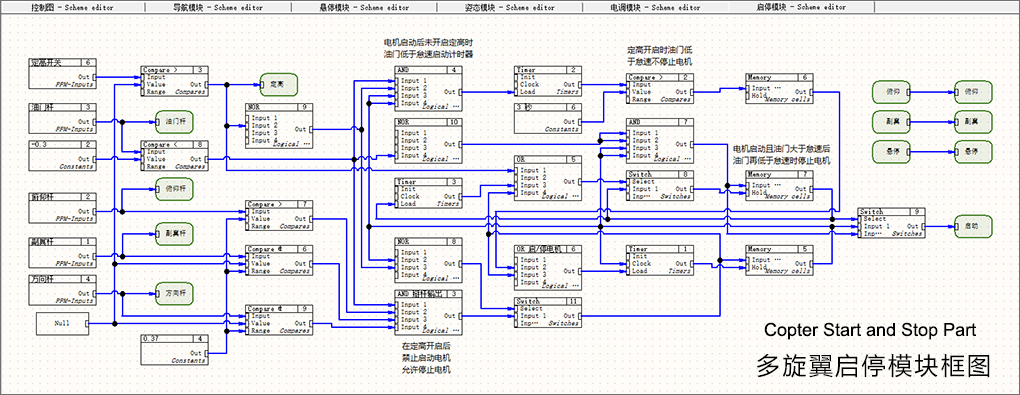
Constructor software
Users according to the characteristics of the control object,
control requirements and control purposes, the use of configuration
modeling tool software on-demand selection of functional modules,
with the mouse will need to connect the functional modules with the
structure and process flow to form a clear and intuitive system
applications . The user can quickly and conveniently enter into the
realization development stage directly from the theoretical design
and complete the configuration modeling, system identification,
dynamic simulation and real-time system operation of the control
system with high efficiency.
Configuration modeling tool software has a wealth of functional
modules and professional module resources, flexible and powerful
system configuration modeling capabilities, strict logic and
embedded semi-physical simulation system, compatible with a variety
of communication protocols, support for a variety of hardware
devices, Users do not need to write program code to be able to
complete all types of UAV all the complex functions required by the
system configuration modeling design and simulation.
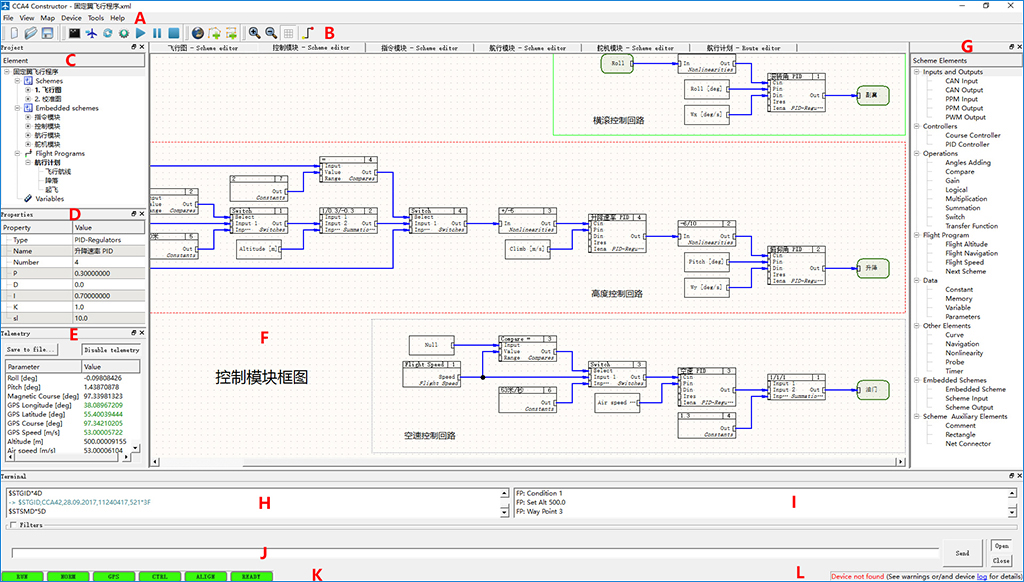
A-Menu
Bar, B-Shortcut icon, C-Project window, D-Object
property bar, E-Telemetry data window, F-Configuration
modeling editing area, G-Function module window, H-Internal
information window, I-Debug information window, J-Command
input window, K-System Status Window, L-Data
transfer status bar.
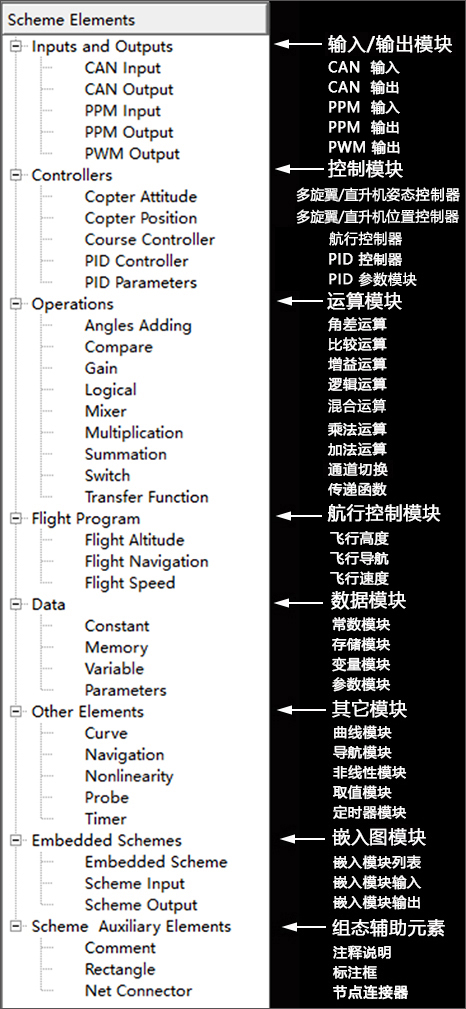
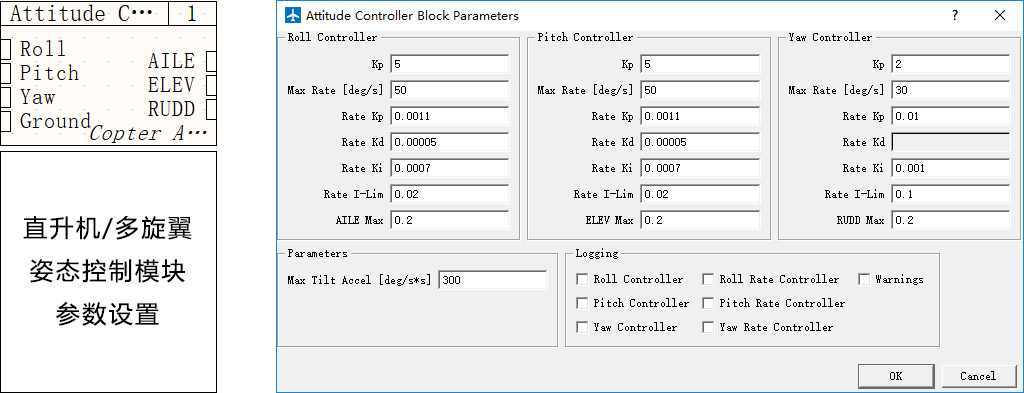
Function Module
Window:
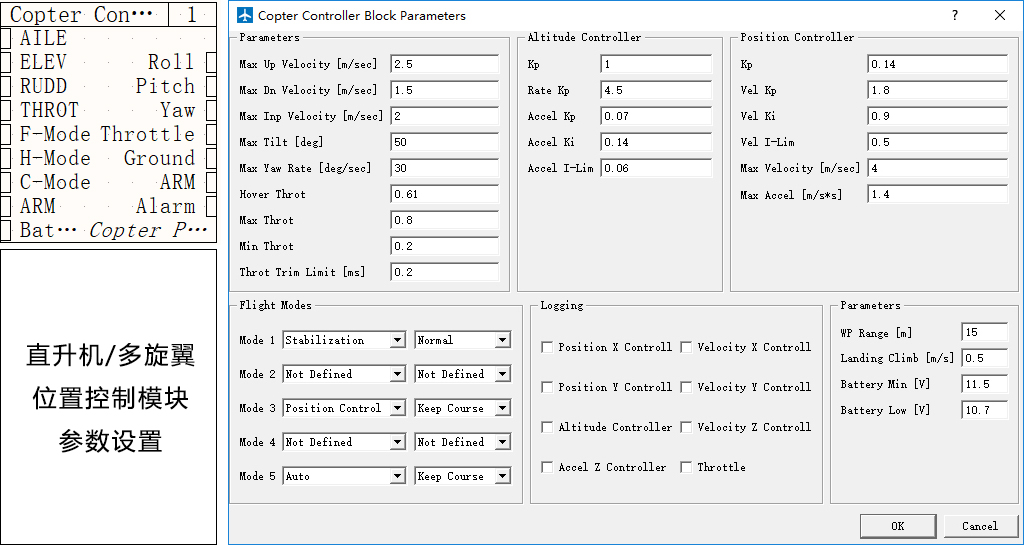
Function Module
Setting Window:
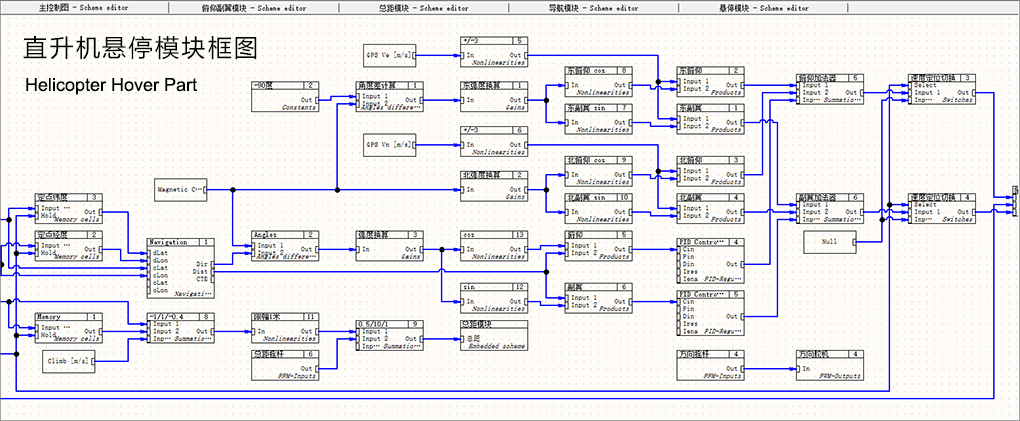
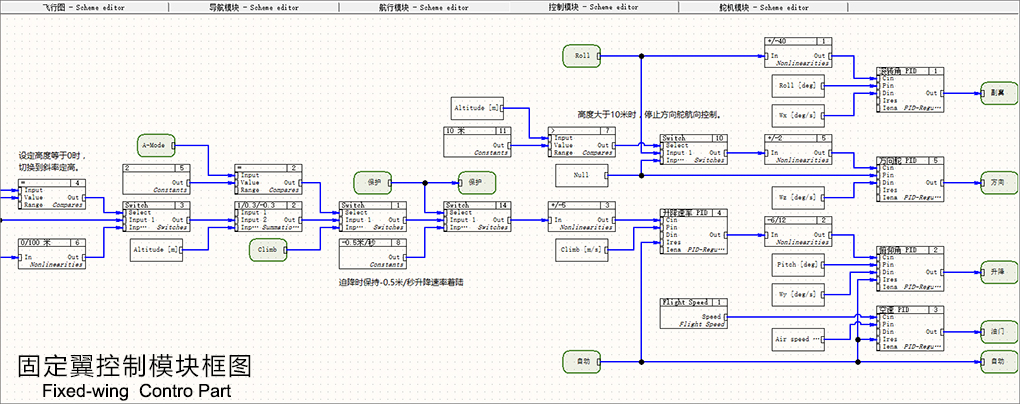
Project Example:
Ziegler-Nichols PID Parameter Setter:
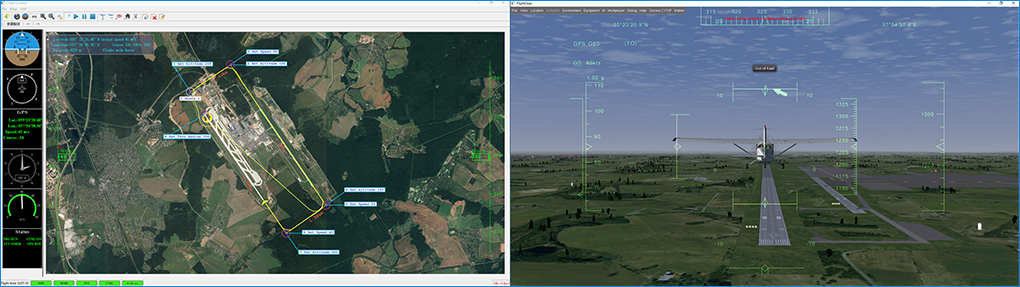
Semi-Physical Simulation System:
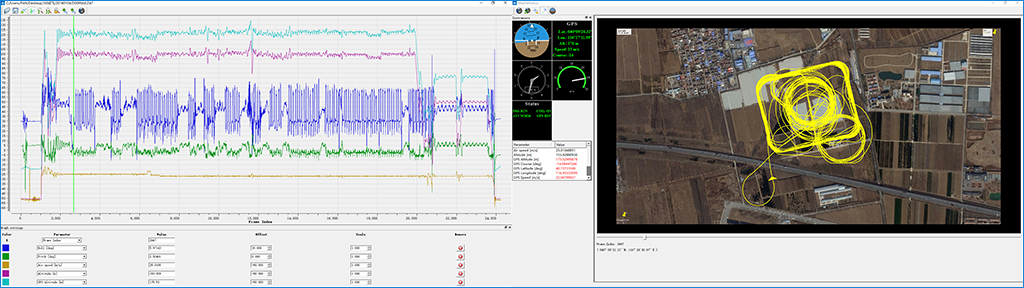
Multi-Function
Professional Flight Data Analysis Software:
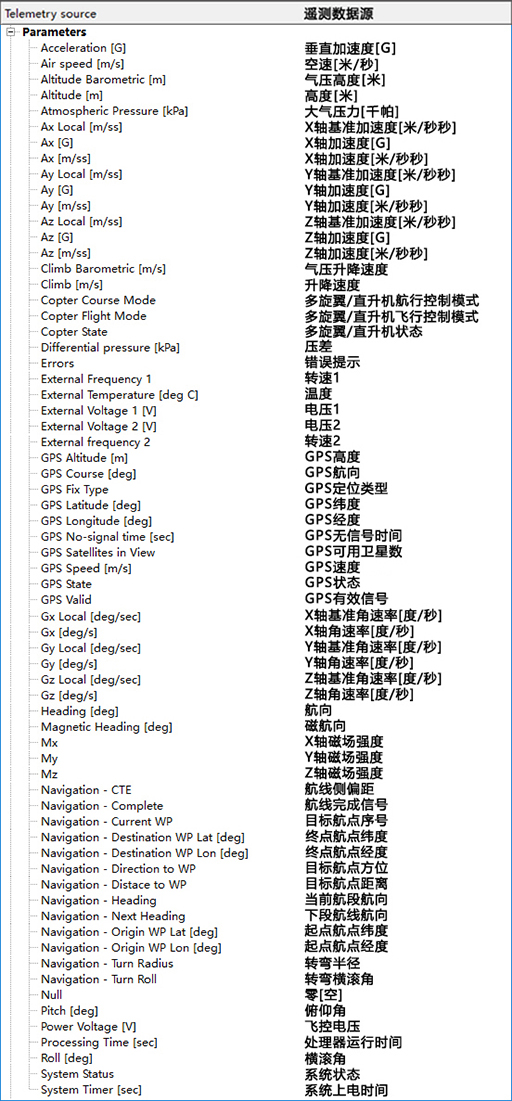
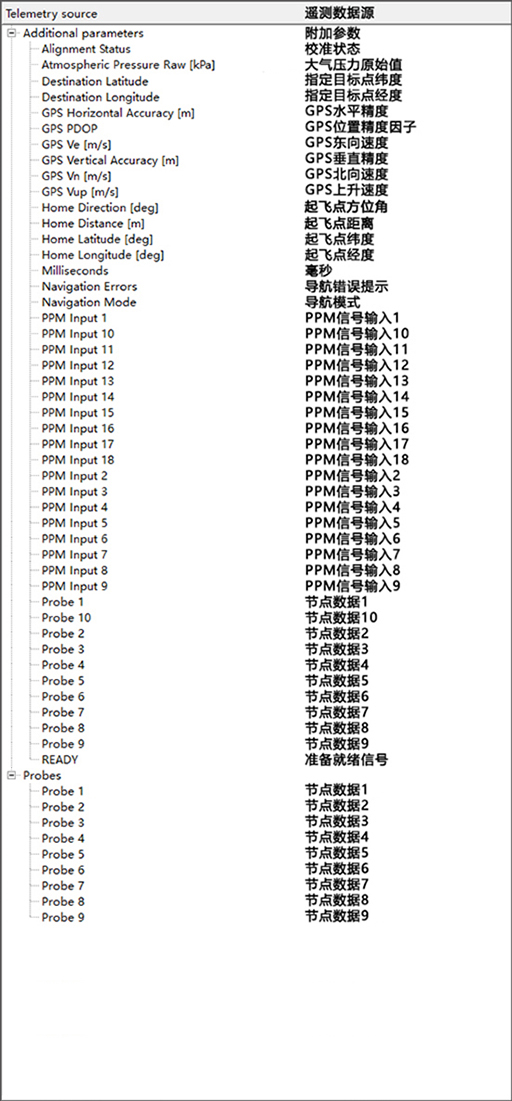
Telemetry Data Source:
System Connection
Diagram:
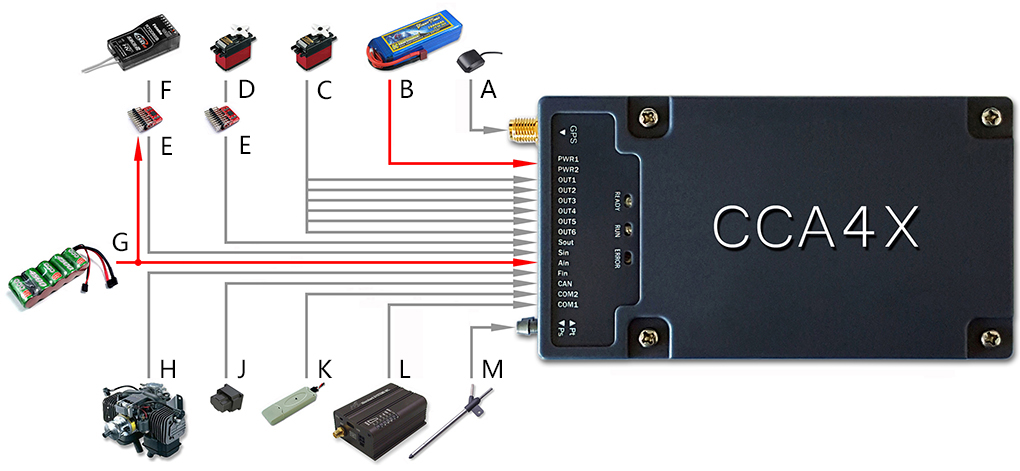
A-GPS
Antenna, B-Device power, C.D-Servos, E-SBUS_PPM_PWM
Converter, F-RC Receiver, G-Servo Battery, H-RPM Sensor,
J-CAN Bus
Sensor, K-Flight Data Recorder, L-Digital Radio, M-Pitot Tube.
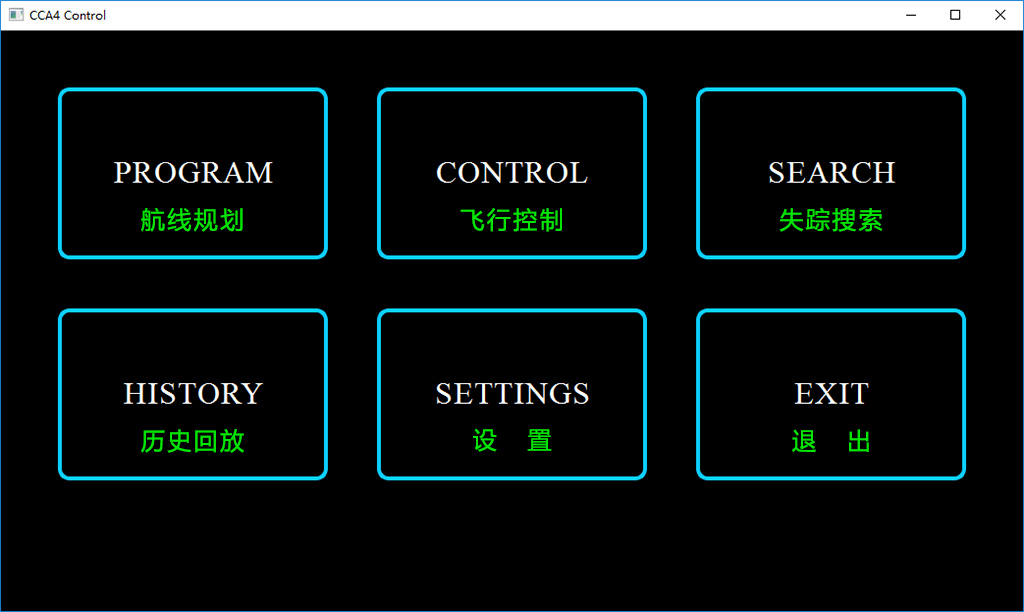
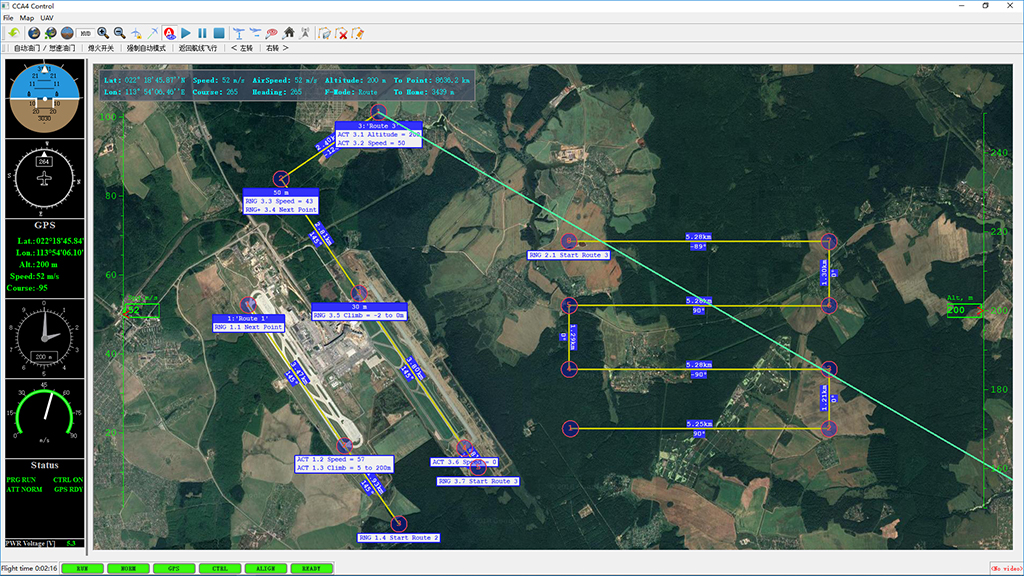
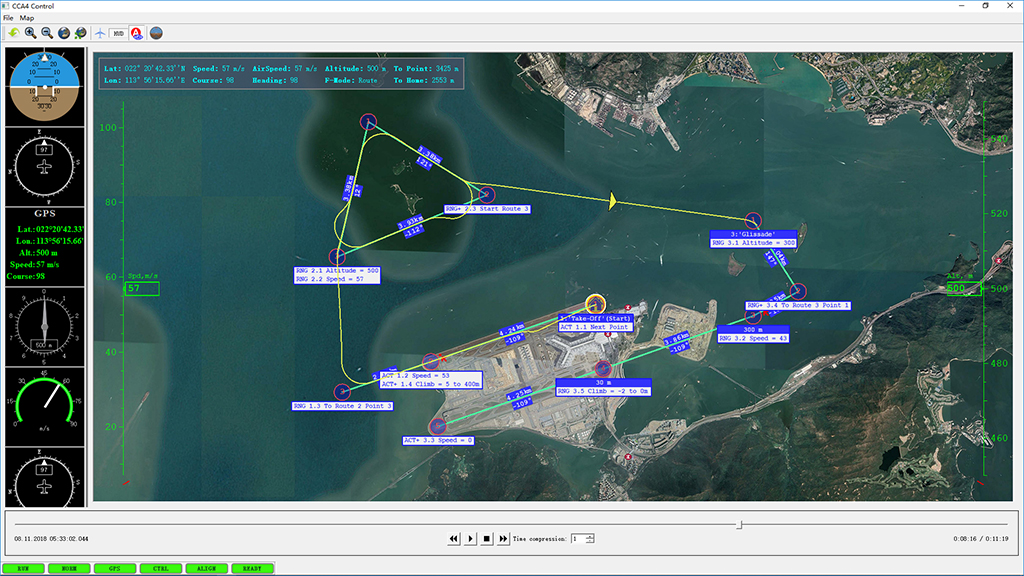
Flight Control Software
The ground flight control software of the CCA4x flight control
system supports a variety of map formats and online maps, can plan a
variety of complex mission routes, you can personalize the control
and display, custom add control buttons and interactive windows for
flexible real-time navigation Control, video overlay function, as
well as flight history playback, missing aircraft search function.
Wide adaptability, versatility, scalability, compatibility and good
use of the system hardware and control software can be a
multi-purpose machine to meet the variety and application
requirements of UAV.
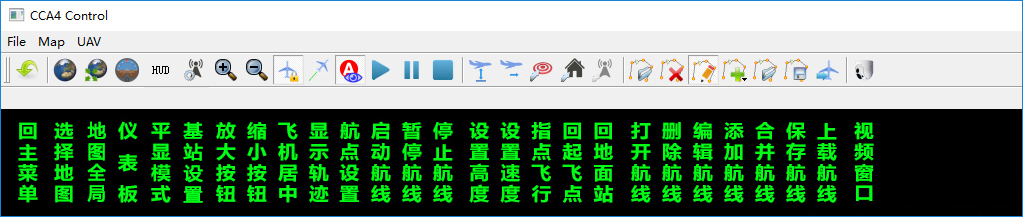
Software Menu:
Setting Menu:

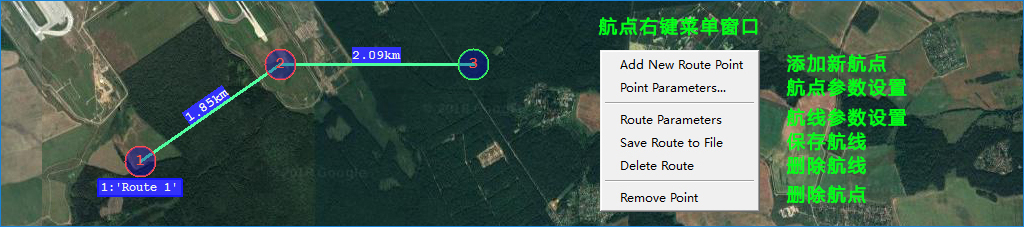
Use
the right-click menu, set the waypoint parameters and route
parameters for mission route planning.
Waypoint Menu:
Set Waypoint Parameters:
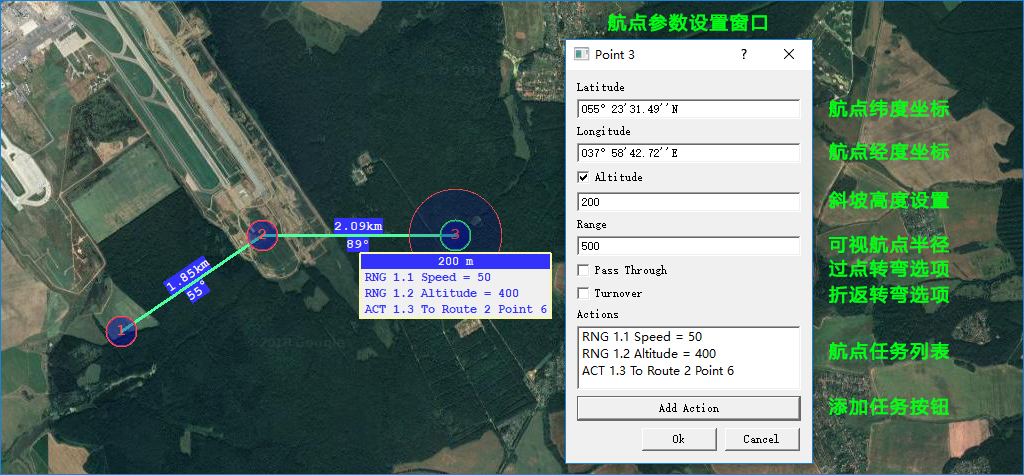
Set Route Parameters:
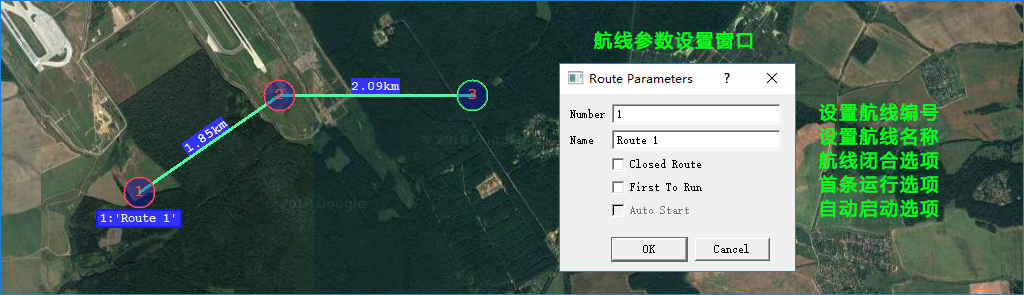
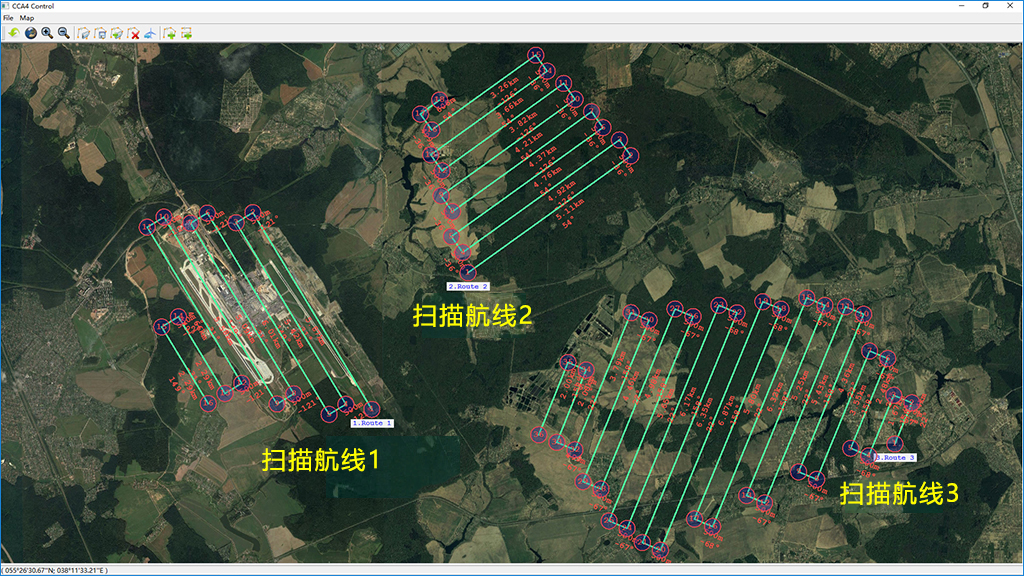
Route Example:

Example of a Scan Route:
Example of a Scan Route Setting:
Multi-task Route
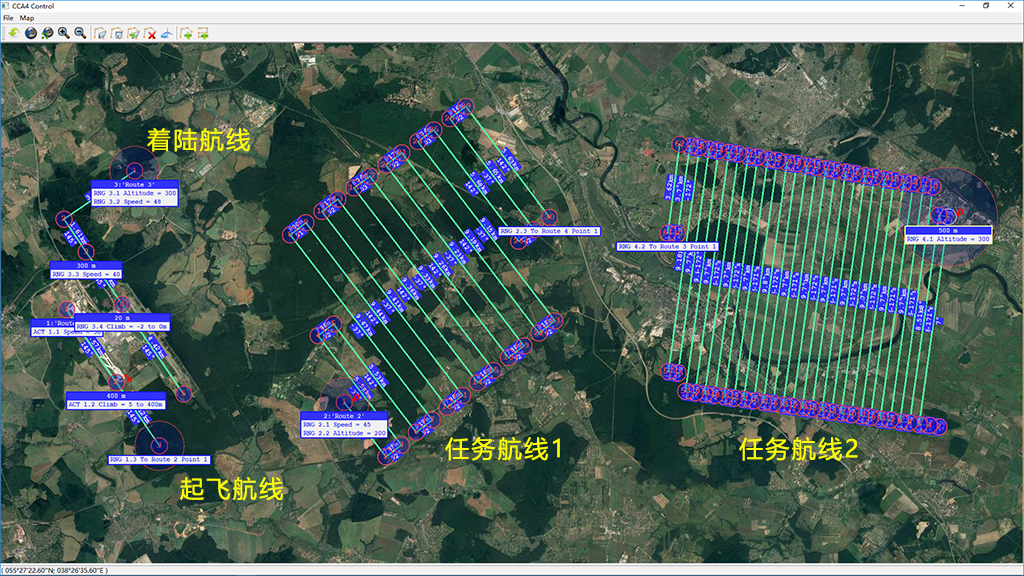
Flight Control
Interface:
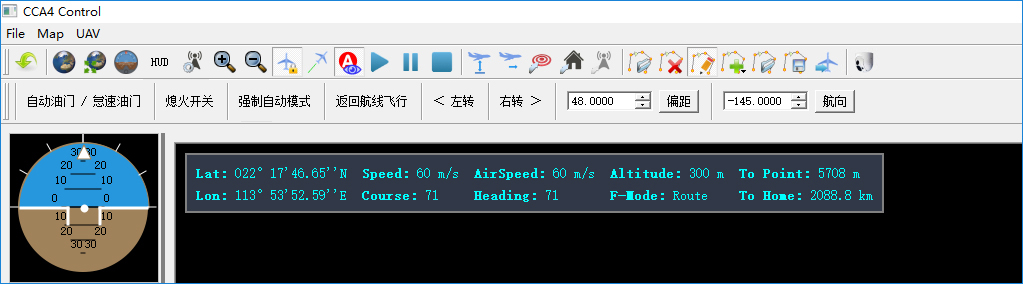
Shortcut icon action button
Custom action buttons and windows
Plane Missing
Search:
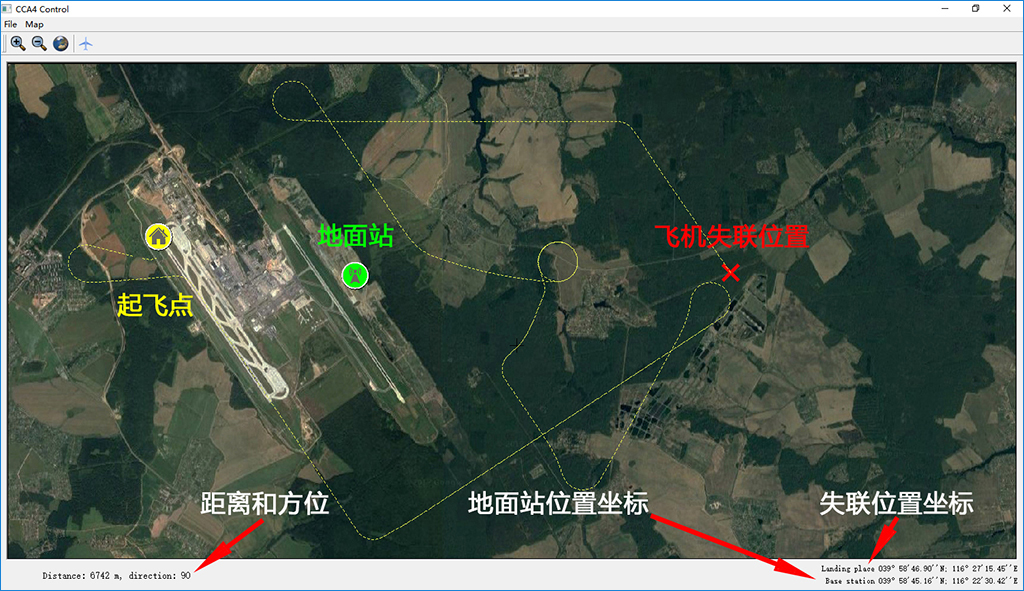
Flight History
Playback:
CCA4X applications in many fields:

























 |

