|
�� |
|
STA34
ͼ�λ���̬��̷��п���ϵͳ
�� |
 |
|
��
�� ��
��
STA34ͼ�λ���̬������˻����п���ϵͳ���dz��ʺ��û����ݸ��Ի�������ж��ο���������չ��STA34�����п��ơ����ݲɼ�����������ƺͰ����������Ĵ�����һ�壬���ü��ٶȼơ����������ݡ������ơ����ٴ���������ѹ�߶ȼơ�5Hz
GPS/GLONASS˫ģ���ջ���DSP�����źŴ�������24λA/Dת������RS-485�豸��չ���ߡ��߾�����ά��̬���㡢��GPS�ź�λ����Ϣ��֪ϵͳ��4G�������ٷ������ݼ�¼�����߾������ֽǴ��������������߶ȼơ�����������������ͨ����չ���������ڹ̶��������������������ͧ�������ˡ���̨�ȸ����˶�����Ŀ��ơ�
��
STA34����һ���ǿ��Ŀ���ƽ̨���û����Խ��俪����Ϊӵ������֪ʶ��Ȩ��ר����Ʒ��Ҳ���������л����ʹ�רԺУ���רҵ�Ŀ���ʵ�����ģ�������Ϊ�����ľ��ܲ������������ڸ����˶�����Ĺ��̲��Ժ͵����ֺ����ȡ�
�� |
|
��ɫ����
��
�� ͼ�λ���̬�˻����棬������ƹ���ǿ��ķ��п�����
��
�� �߾��ȶ�̬��ά��̬��Ϣ��������صĸ��پ��ܲ������ݡ�
�� AHRS �� GPS-INS ������ϵ���ϵͳ��
�� PID ���������ջ��������������˹�����ʵʱ������
�� JSBSim ���ж���ѧģ�ͺ� FlightGear ����ģ������ɵİ���������ϵͳ��
�� RS-485�豸��չ����
��
��Ʒ��ȫ���ܹ淶��ƣ��ڲ�����ͺ�������ֻ��д�벻�ܶ�ȡ�͵�����
�� ���ø����ʡ���������������������ݲɼ�����ϵͳ
�� �ṩ���ַ���ģʽ�����������߹滮���Զ����˹�ָ�ť�ͽ������ڡ�
�� ����Ŀ��λ�ö�λ���ܣ����١�����̽����Լ�������̨���ƹ��ܡ�
�� ��Ƶ���ӡ���վGPS���롢������ʷ�طš��ɻ�ʧ��λ�ò��ҹ��ܡ�
�� ����ֵ���á�������ʾ���Զ������������ȡ�
�� ��
|
 |
|
|
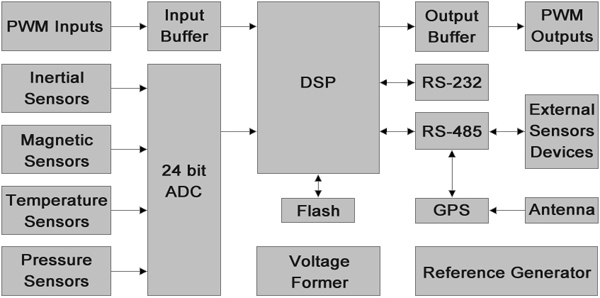
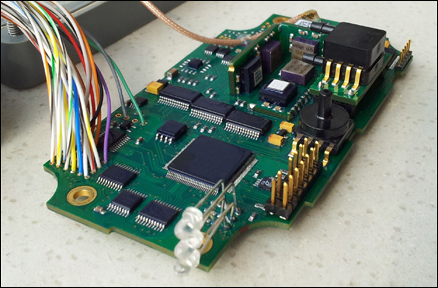
Ӳ���ܹ� |
|
��
�� |
|
|
 �� ��ҵ�� TMS320F 2811
DSP �����źŴ����� �� ��ҵ�� TMS320F 2811
DSP �����źŴ�����
�� 24 bit ADC��CPLD
�� ������������ݡ�˫������ٶȼơ����������
�� ˫����ٴ�����
�� ��ѹ�߶ȼ�
�� Ublox NEO-6Q 5Hz GPS/GLONASS ˫ģ���ջ�
�� 8 ͨ�� PWM �����ź����� ������չ��13��ͨ����
�� 7 ͨ�� PWM ����ź���� ������չ��15��ͨ����
�� 2 ͨ����ѹ���
�� 2 ͨ��ת�ټ��
�� RS-232 X 2 ��ͨѶ�ͷ������ݼ�¼���ӿڣ�
�� RS-485 X 1 �����ô��������û��豸�ӿڣ�
�� |
|
�ӿ�������
|
 |
��
CSS34�ӿ�����������STA34���˻����п���ϵͳ����������豸�����ӡ�����Ҫ���ܰ��������ң���ź�Ӳ�л���������STA34��Ч����ң�ؽ��ջ�ͨ���ӿڡ����ͨ���ӿڡ���STA34��������Ķ������ϵͳ��RS-232���ݲɼ���ͨ�Žӿڡ�RS-485�豸��չ���߽ӿڡ���ѹ��ת�ټ��ӿڡ�STA34X�Ż���ѹ��Դ������ģʽ����״̬LEDָʾ�Ƶȡ�
�� PWM �����ź�Ƶ�� 50 ��
20% ����
�� PWM �����źŸߵ�ƽ 1.7��5.75 ��
�� PWM �����źŵ͵�ƽ �\0.8��0.5 ��
�� �������������Դ֧�� 4.5��6 ��
�� ��� PWM �źŸߵ�ƽ 3.84��5.9 ��
�� ��� PWM �źŵ͵�ƽ 0��0.33 ��
�� STA3X ���ⲿ������֧�ֵ�ѹ 5.6 �� 3% ��
�� ������� 600 ������֧�ֵ�ѹ 7��16 ��
�� |
 |
|
�� |
|
�� |
|
ѡ�䴫��������
Ϊ�����û��ĸ��Ի�����STA34���˻����п���ϵͳ�ṩ�˶������ô�����������ͨ�� RS-485 �豸��չ�����弴�á�
|
|
�� |
|
�� |
|
�� |
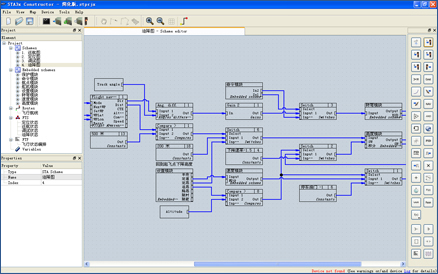
���п����ɹ�����
�� |
|
 |
|
STA34
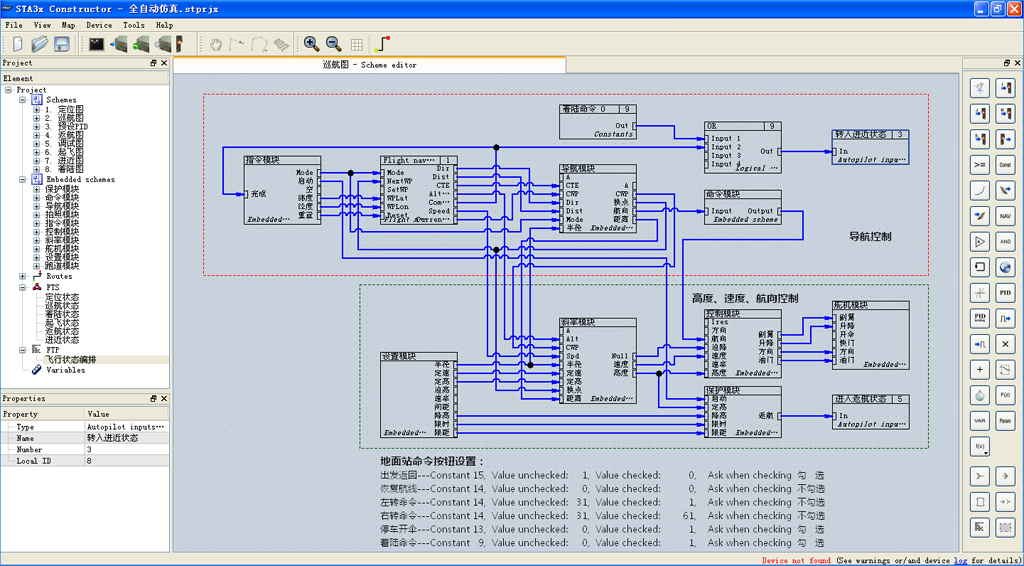
Constructor��һ���Ƚ��Ķ��ͼ�λ���̬����������dz��ʺ��û����ݸ��Ի���������˻����п���ϵͳ���ж��ο���������չ�����п����ɵ���ƼȲ���Ҫ���ø���ļ�������רҵ֪ʶ��Ҳ����Ҫ��д�����Ĵ������룬������Ϸ�������ӽڵ㼴�ɿ��ٸ�Ч�������ƹ����������Ƶķ��п����ɣ�ͨ��STA34���õ� JSBSim ���ж���ѧģ�ͺ� FlightGear ����ģ������ɵİ���������ϵͳ���в��ԡ����κ���֤����Ч�ؽ�ʡ�˴���ʱ�䣬�����˷���������ա�
�� �� |
�����ɰ���
�� |
 |
|
�� |
 |
|
�� |
 |
|
�� |
|
�� |
|
�� |
|
���п��Ƶ���վ |
|
�� |
|
 |
|
�� |
|
�� |
|
STA34���˻��������վ�����������Ŀ���ʽ�ܹ����û������Զ���������վ����п���ϵͳ���������ʾ�Ϳ��Ʒ�ʽ���������վ������ʵ��ͬʱ�����ļ����˻����������վ֧�����ֵ�ͼ����ϵ��WGS84��PZ-90��SK-42��Gauss-Kruger
Projection���������վ�ܹ�ͬʱ�����ֹ���ģʽ��ת����ʵʱ���п��ơ�������ʷ�طš��ɻ�ʧ��λ����Ѱ�������߹滮�� |
|
�� |
|
���п���ģʽ
������Աͨ����Ļ�ܹ��۲쵽���˻�������̬���ɻ�λ�á�����վλ�á����п���ģʽ�������ߡ���ǰĿ�꺽�㡢���й켣����Ƶ���ӻ���ȸ��ַḻ�ķ�����Ϣ��������Աͨ���������վ�����ܹ�ʵʱ�����˻������������ֲ�����
�� ʵʱ�����滮����
�� ʵʱ����������
�� ָ����ź������
�� ���궨λ�÷���
�� ָ������λ�÷���
�� �����Ʒɻ�����ת / ������ / ֱ�С���ת / ������ / ֱ��
�� ʵʱ������и߶ȡ������ٶȡ����ߺ��㡢�������ߡ������ظ����������÷��еȡ�
�� ͨ���û��Զ��尴ť���Զ��崰�ڣ�����ִ�г�����������ͣ������ɡ����̨�����Լ������Զ���������ơ� |
|
�� |
|
��Ƶ�������
������Ƶ������Ե����ڵ�ͼ������ʾ��ͬʱ�Զ������ڷ�����ʷ�ļ��У��û����Ը���
��Ҫ�ֱ��趨��Ƶ��ʾ֡���ͱ����¼֡����ͨ��������Ͻ���̨ͼ�꣬�����ڵ�ͼ����Ƶ������л��� |
|
 |
|
�� |
|
�� |
|
������ʷ�ط�
��Ļ������ʾ��Ϣ��������Ƶ���ӻ��棩�Զ������ڷ�����ʷ�ļ��У��û����Ը������ں�ʱ�������ʷ���м�¼�����й��̻طſ������š�6
����š�������ҷ�Ȳ�������Ƶ���ӻ���ͬ���طš� |
|
 |
|
�� |
|
�� |
|
ʧ��λ����Ѱ
�����˻�������������Ƚ�����Ա���Դ�ʵʱ���п���ģʽת�����ɻ�ʧ��λ����Ѱģʽ���������վ��Ļ���ڵ�ͼ����ʾ�ɻ����ʧ��λ�á���λ���������Ϣ���û��ڵ������վʵʱ�������ܹ�Ѹ���ҵ��ɻ�
�� |
|
 |
|
�� |
|
�� |
|
�����߹滮
�û��������±༭���е������ߺʹ����µ������ߣ���ʷ�����߿��Ա����ں����ļ����ڣ��������վ����Ԥ��������õ�10�������ߡ��������г��溽�ߺ�ɨ�躽�����֣����溽�߷�Ϊ���ȸߺ��ߡ���ߺ��ߡ���߱��ٺ������֡� |
|
 |
|
�� �� |
����ָ��
�� |
|
�� �� |
��
�� |
�� ֵ |
�� λ |
|
1 |
��ת������ |
�� 180 |
�� |
|
2 |
����������
|
�� 90 |
�� |
|
3 |
��������� |
�� 180 |
�� |
|
4 |
��ת�Ǻ����Ƿֱ���
|
0.1 |
�� |
|
5 |
����Ƿֱ���
|
0.3 |
�� |
|
6 |
�������������
|
�� 150 |
��
/
�� |
|
7 |
���ٶ����� |
�� 5 |
��
/
��2 |
|
8 |
����ѹ������ |
15��115 |
ǧ�� |
|
9 |
ѹ��ѹ������ |
0��4 |
ǧ�� |
|
10 |
��ѹ�߶����� |
- 1000��11000 |
�� |
|
11 |
��������
|
0��300 |
����
/
Сʱ |
|
12 |
�¶����� |
- 20��+ 70 |
���϶� |
|
13 |
��ѹ��������
|
�� 0.1 |
ǧ�� |
|
14 |
ѹ���������
|
�� 0.004 |
ǧ�� |
|
15 |
��ѹ�߶Ȳ�������
|
�� 10 |
�� |
|
16 |
���ٲ�������
|
�� 10 |
����
/
Сʱ |
|
17 |
�¶Ȳ�������
|
�� 3 |
���϶� |
|
18 |
����ѹ�������ֱ���
|
0.0033 |
ǧ�� |
|
19 |
ѹ��ѹ�������ֱ���
|
0.0008 |
ǧ�� |
|
20 |
��ѹ�߶Ȳ����ֱ���
|
0.3 |
�� |
|
21 |
���ٲ����ֱ���
|
2 |
����
/
Сʱ |
|
22 |
�����ٶȲ����ֱ���
|
0.25 |
��
/
�� |
|
23 |
���ݴ���Ƶ��
|
73 |
���� |
|
24 |
ʹ���¶����� |
- 25��+ 50 |
���϶� |
|
25 |
������ѹ
|
5.5��6.0 |
�� |
|
26 |
��������
|
300 ��10% |
���� |
|
27 |
RS-232
��
RS-485
�ӿڲ�����
|
4800��115200 |
���� |
|
28 |
��dzߴ�
|
125 X 65 X 40 |
���� |
|
29 |
PCB
��ߴ�
|
104 X 57 X 13 |
���� |
|
30 |
�������п�
/
�ǣ�
|
150 / 30 |
�� |
�� |
|
�� |