|
CCA42
工业级多功能图形化可编程飞行控制系统
-
工业级多功能可编程飞行控制系统
-
专业的图形化控制律设计软件
-
灵活强大的工程应用开发平台
-
DSP 处理器及高精度传感器
-
自定义高速遥测数据采集
-
嵌入式半物理仿真系统
-
丰富的用户设备接口
-
适用于固定翼直升机多旋翼飞艇车船机器人云台等
|
 |
概 述
CCA42工业级多功能图形化可编程飞行控制系统,采用了类似于MATLAB和Simulink的控制律组态建模设计软件,只需简单操作鼠标连接相关的功能模块,无需编写代码就可以构建结构和流程直观清晰的飞行控制系统程序。
软件内置JSBSim和FlightGear组成的半物理仿真系统,能够使你从方案设计直接进入到开发应用阶段,高效快捷地完成飞行控制系统的组态建模、系统辨识、动态仿真、在线调参和实时运行。
用户不仅可以使用软件提供的各种专业功能模块,还能够使用C编程语言创建自己的专属功能模块,非常适合专业用户根据个性化需求进行工程开发和应用扩展。产品适用于固定翼、直升机、多旋翼、垂起固定翼、倾转旋翼机、飞艇、特殊飞行器、无人车、无人船、机器人和云台等各种运动载体。
硬件组成
-
三轴角速率陀螺、三轴加速度计、三轴磁力计
-
双嘴空速传感器
-
气压高度计
-
10Hz
四系统GPS卫星接收机/RTK差分GPS
-
DSP 数字信号处理器 、CPLD、24 位 A/D 转换器
-
16 通道 CAN
Aerospace
设备扩展总线
-
双电源宽电压冗余供电系统
-
18 通道 PPM 控制信号输入
-
18 通道舵机输出
-
2 通道电压监测
-
2 通道转速监测
-
8G 外置 USB 高速飞行数据记录器
|
 |
特色功能
-
采用图形化控制律组态建模技术,快速构建功能强大的飞行控制系统。
-
固定翼、旋翼双模式高精度动态三维姿态解算。
-
提供100多项精密测量数据,各项数据传输速率可分别定义,最高速率100Hz。
-
AHRS 和 GPS-INS
惯性组合导航算法。
-
优异的宽频耐震特性,可用于各种严酷的使用环境。
-
齐格勒―尼科尔斯阶跃和频率响应两种 PID
控制器参数整定器。
-
JSBSim 飞行动力学模型和
FlightGear 飞行模拟器组成的半物理仿真系统。
-
CAN
Aerospace 协议设备扩展总线
,可接入各种用户设备和传感器等。
-
军品安全保密规范设计,内部程序和航行数据只能写入不能读取和导出。
-
方便灵活的航行控制方式,随时随地可从任意航线的任意航点开始飞行。
-
多种飞行模式:智能无缝压线飞行模式、航点驻留飞行模式、指点驻留飞行模式等。
-
飞行计划可由多条航线组成,最大容量 100 条航线,支持 KML 航线文件导入。
-
每条航线可设置 1000 个航点,每个航点可定义 23 项参数和 18 项任务操作。
-
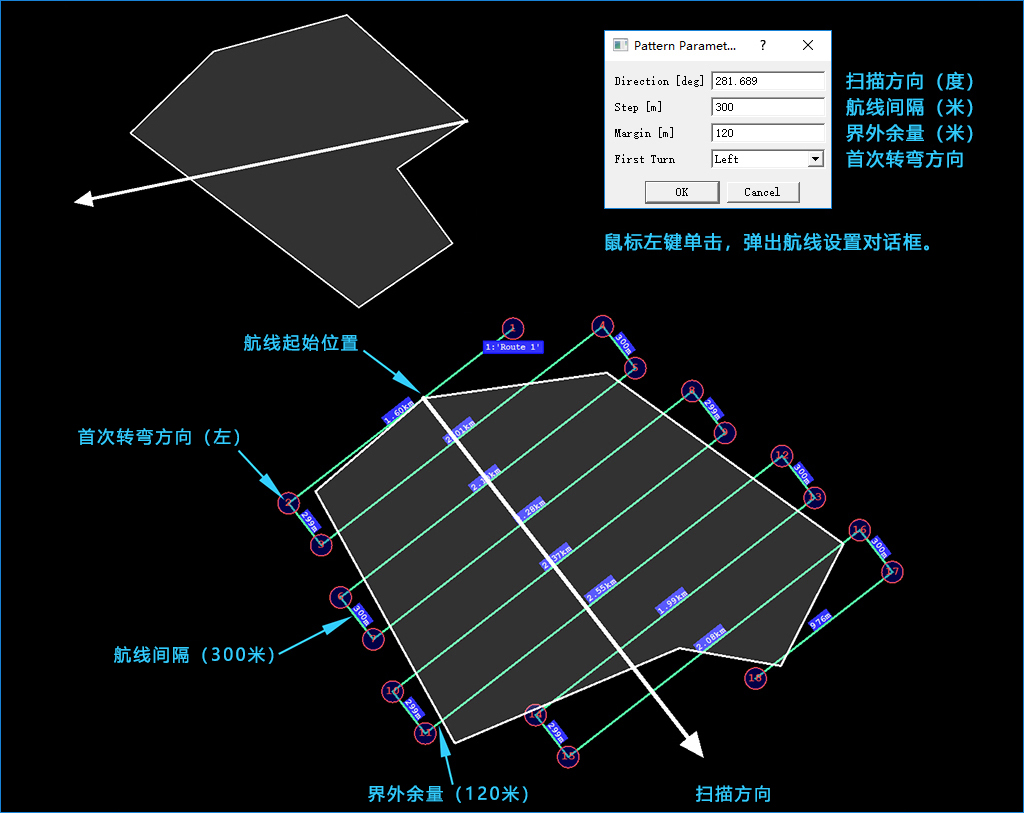
多边形扫描航线,可定义航线扫描方向、航线间隔、界外余量、转弯方向等。
-
5 种在线地图:Google
路线图、混合图、卫星图、地形图、Open Street 开放街图。
-
自定义仪表显示方式,自定义操作按钮和交互窗口,一站多机控制。
-
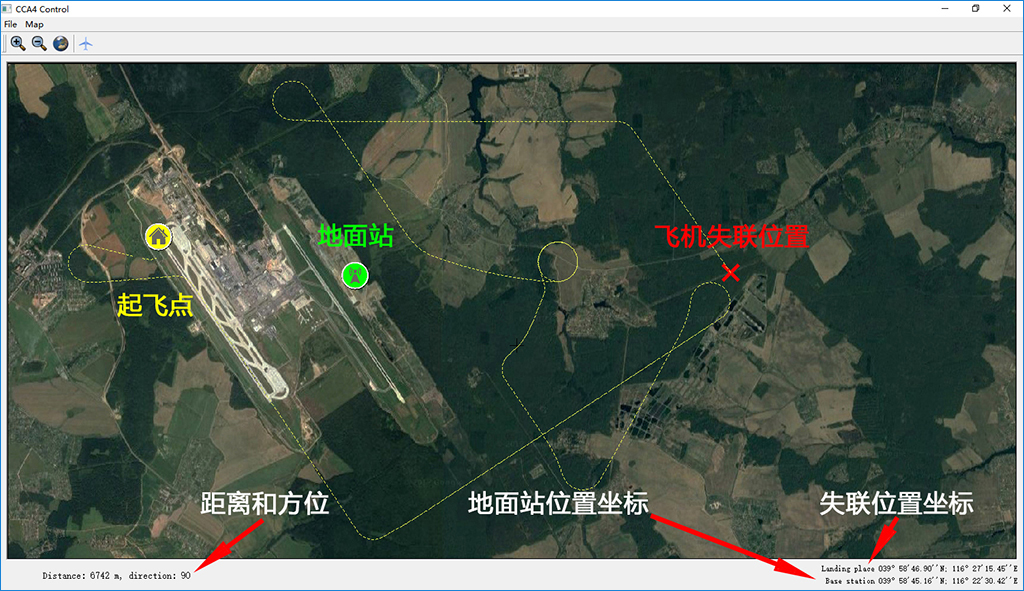
视频叠加、基站 GPS/RTK 、飞行历史回放、飞机失踪位置搜寻等。
-
多功能专业飞行数据分析软件。
-
飞行控制软件界面自定义LOGO。
技术指标
|
物理参数 |
|
输入/输出 |
|
|
尺寸 |
:115x65x23mm |
PWM输出 |
: 6 通道
|
|
重量 |
:120g |
PPM输出 |
:12 通道
|
|
电气参数 |
|
PPM输入 |
:18 通道
|
|
电压 |
:DC 4V~18V |
功能接口 |
|
|
电流 |
:220mA@6V |
Sin输入 |
:1 路(18通道)
|
|
功耗 |
:1.32W |
Sout输出 |
:1 路(12通道)
|
|
系统精度 |
|
CAN总线 |
:1 路(16通道
Aerospace 协议)
|
|
姿态 |
:俯仰
0.1°/±90°、滚转
0.1°/±180°、航向
0.3°/±180° |
RS232-1 |
:PC通信/数传电台
|
|
定位 |
:2.5m(绝对精度) |
RS232-2 |
:RTK/LiDAR/飞行数据记录器/仿真
|
|
测量范围 |
|
电压监测 |
:2 路(0~30V)
|
|
角速度 |
:±300°/s |
转速监测 |
:2
路 |
|
加速度 |
:±2g
/ ±8g
双范围 |
航线/航点 |
|
|
气压高度 |
:-1000m~11000m |
航线 |
:100 条(支持多边形扫描航线, KML航线)
|
|
空速 |
:0~300km/hr、0~500km/hr
可选 |
航点 |
:1000 个/每条航线
|
|
GPS接收机 |
|
定义 |
:23 项参数/ 18 个任务动作
|
|
型号 |
:Ublox
MAX-M8Q |
在线地图 |
|
|
星系 |
:GPS,
GLONASS, BeiDou, Galileo |
Google |
:路线图、混合图、卫星图、地形图 |
|
刷新速率 |
:10Hz |
Open Street |
:开放街图 |
|
使用环境 |
|
飞行数据记录器 |
|
|
使用温度 |
:-25°C~+70°C
|
容量/接口 |
:8G/USB/高速/外置
|
控制律组态建模设计软件 CCA Constructor
用户根据控制对象的特性、控制要求和控制目的,使用控制律组态建模软件按需选择功能模块,用鼠标将需要相互关联的功能模块用连线连接,就构成了结构和流程直观清晰的系统应用程序。用户能够快速方便地从理论设计直接进入到实现开发阶段,高效率地完成控制系统的组态建模、系统辨识、动态仿真以及实时系统运行。
飞行控制律设计软件拥有丰富的通用和专用功能模块资源,用户还能够自定义自己的专属功能模块,灵活强大的组态编辑功能、算法逻辑校验、在线调试运行和嵌入式半物理仿真系统,兼容多种通信协议、支持多种硬件设备。用户不需要书写任何程序代码,就能够完成飞行器所需的各种复杂功能的工程控制算法设计、调试和仿真。
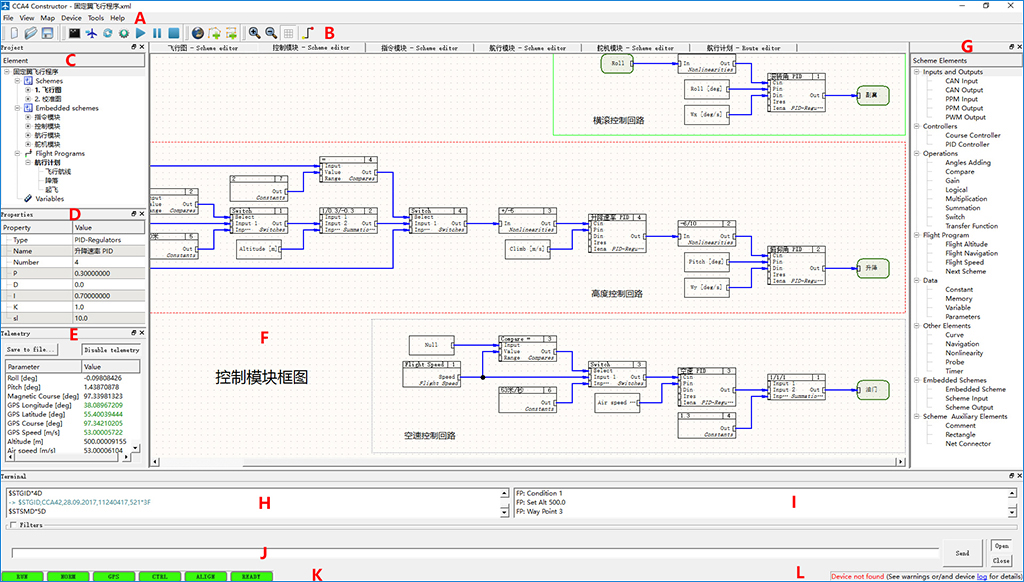
A.菜单栏
、B.快捷工具栏、C.工程窗口、D.对象属性栏、E.遥测数据窗口、F.组态建模编辑区、G.功能模块窗口、H.内部信息窗口、I.调试信息窗口、J.命令输入窗口、K.系统状态窗口
、L.数据传送状态栏。
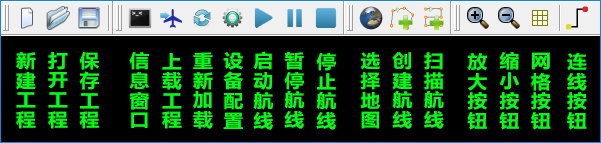
快捷工具栏:
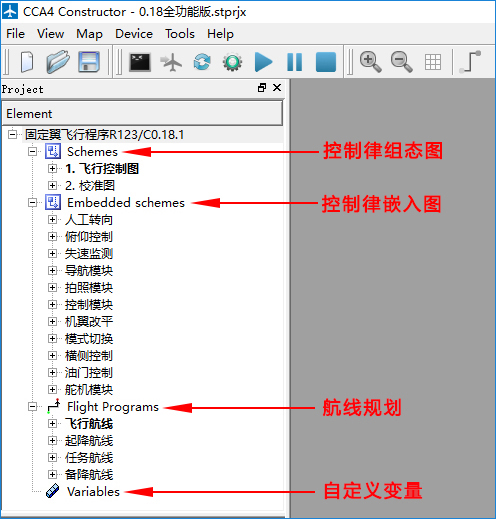
工程窗口:
系统状态窗口:

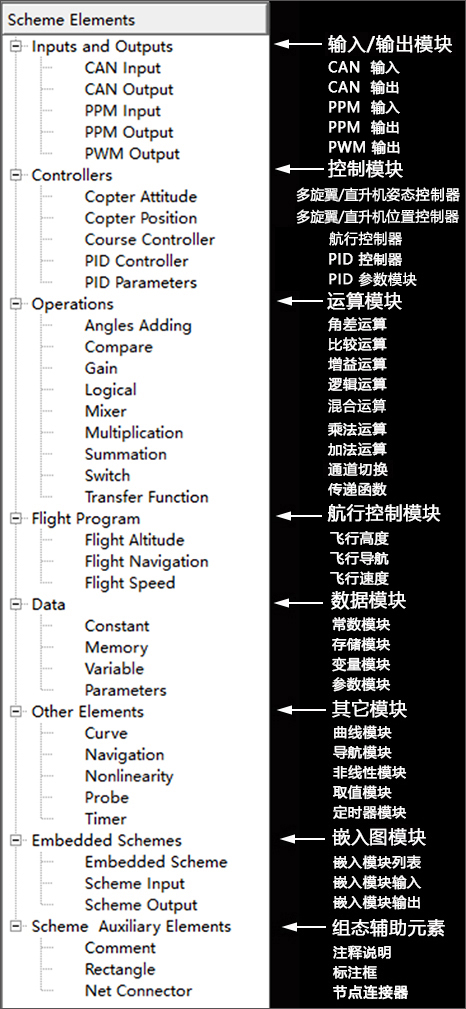
功能模块窗口:
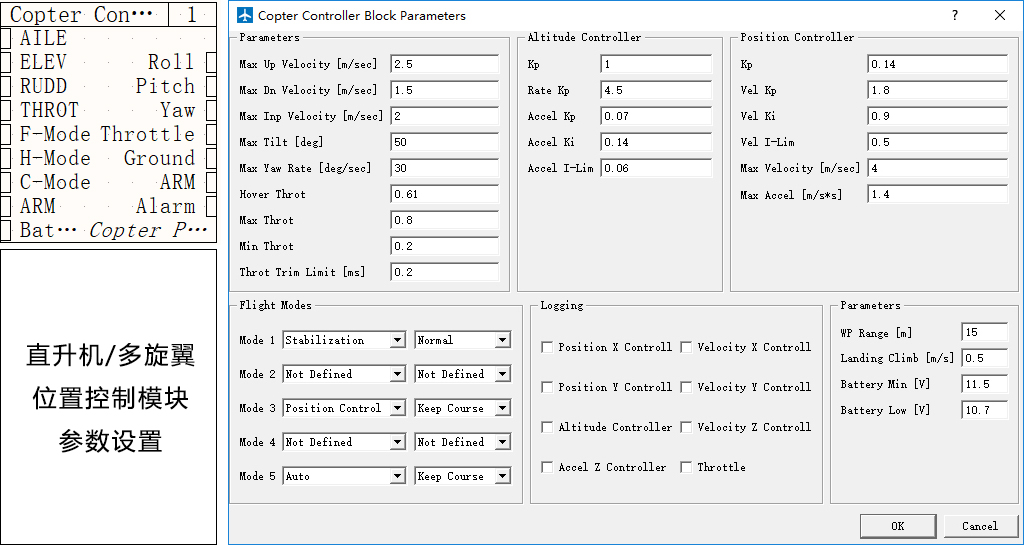
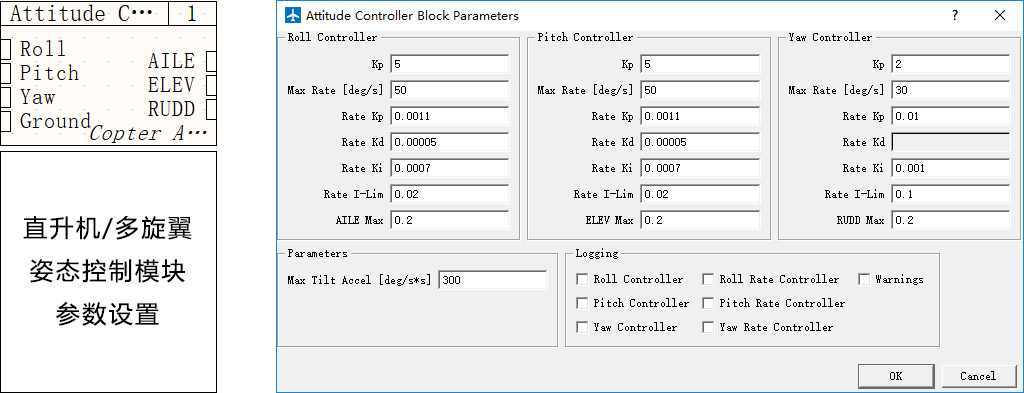
功能模块参数设置案例
:
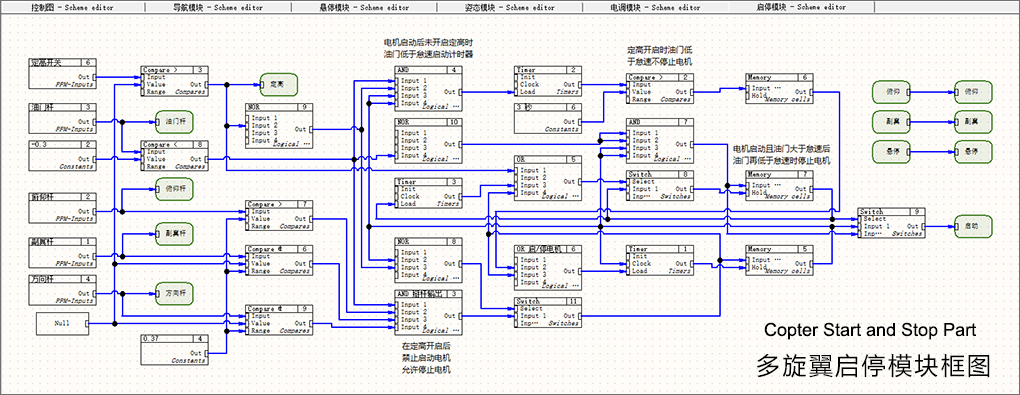
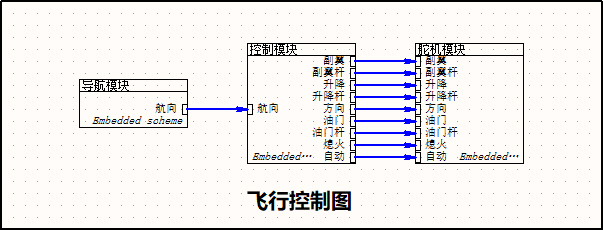
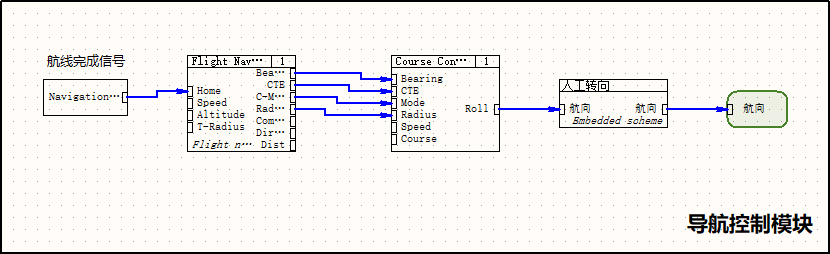
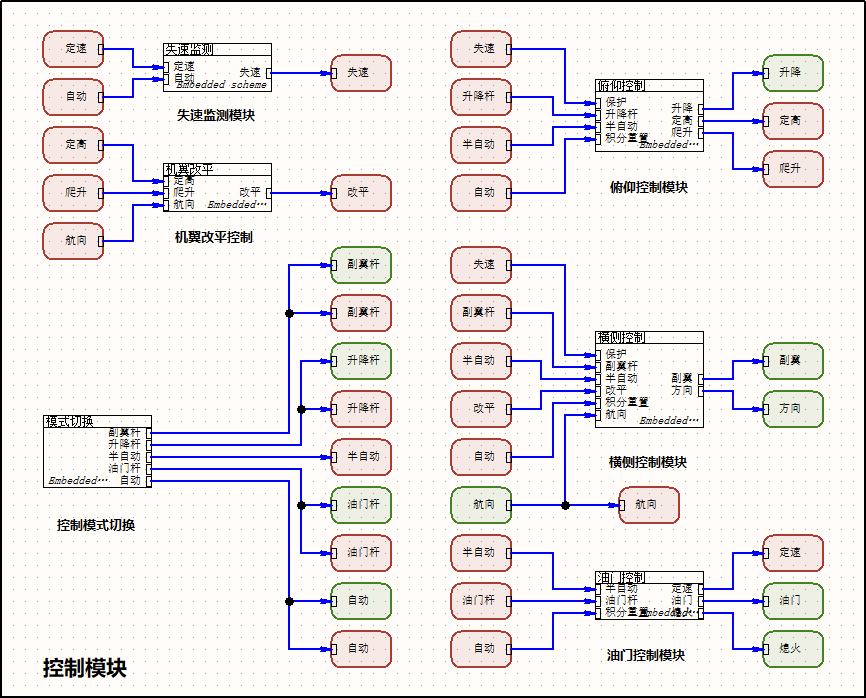
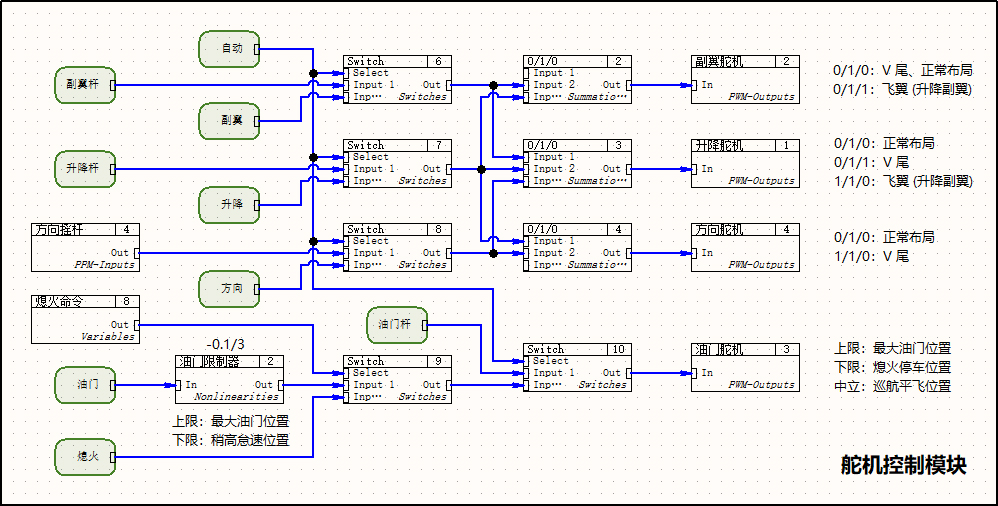
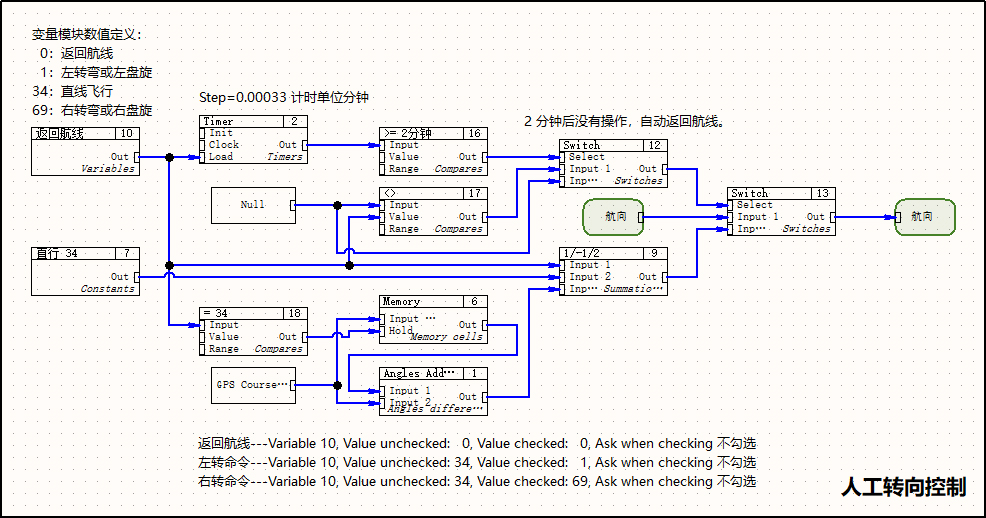
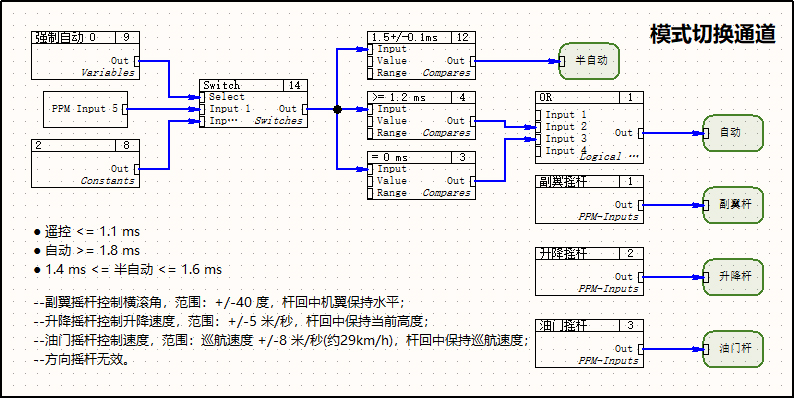
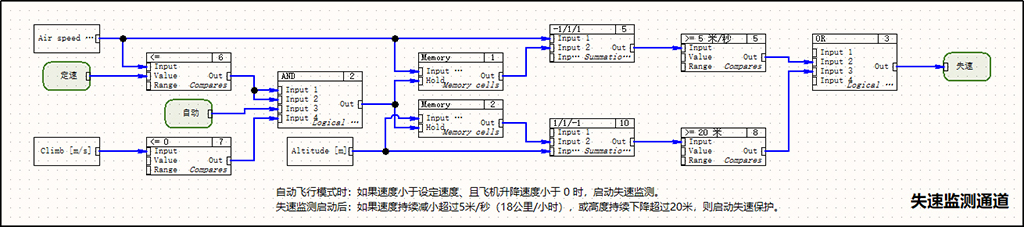
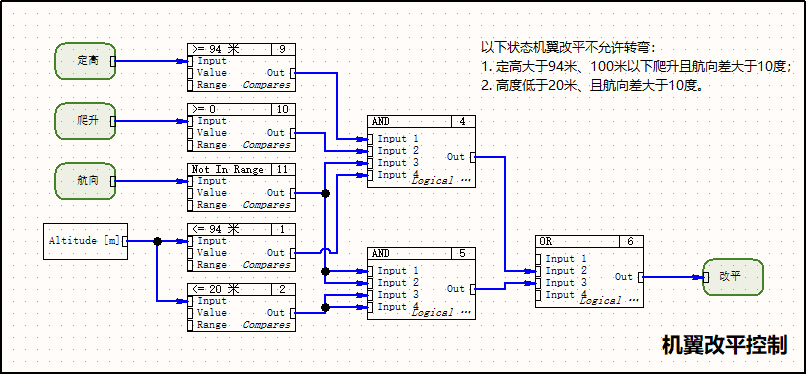
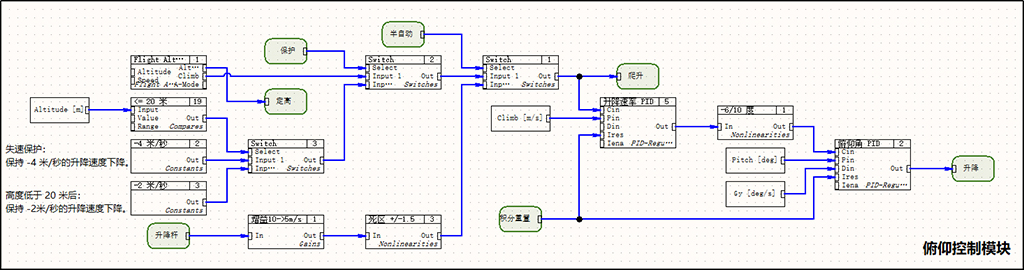
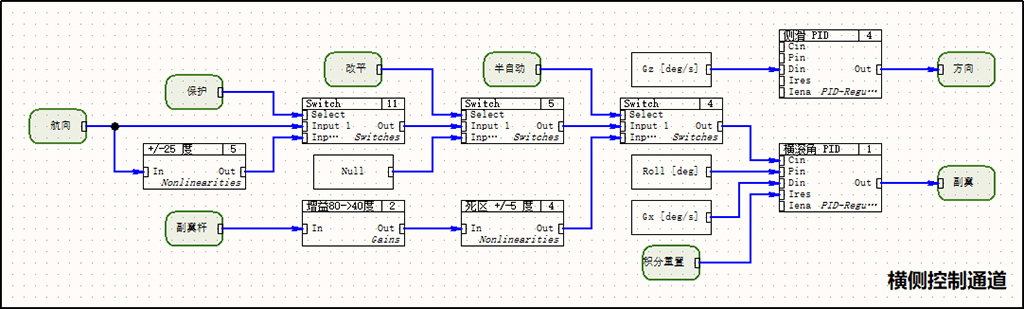
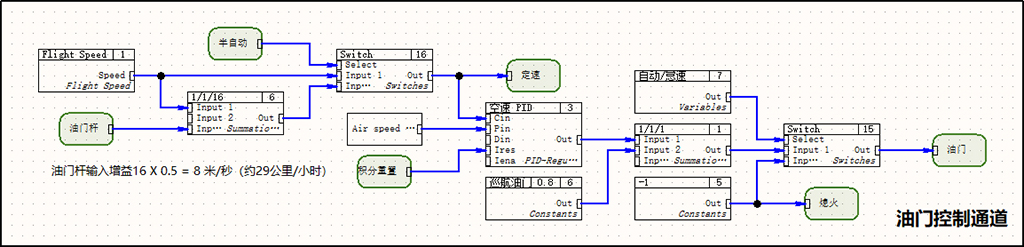
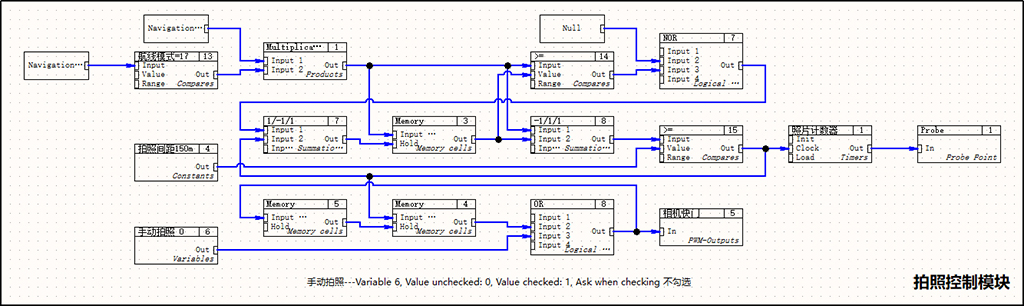
控制律组态建模案例
:
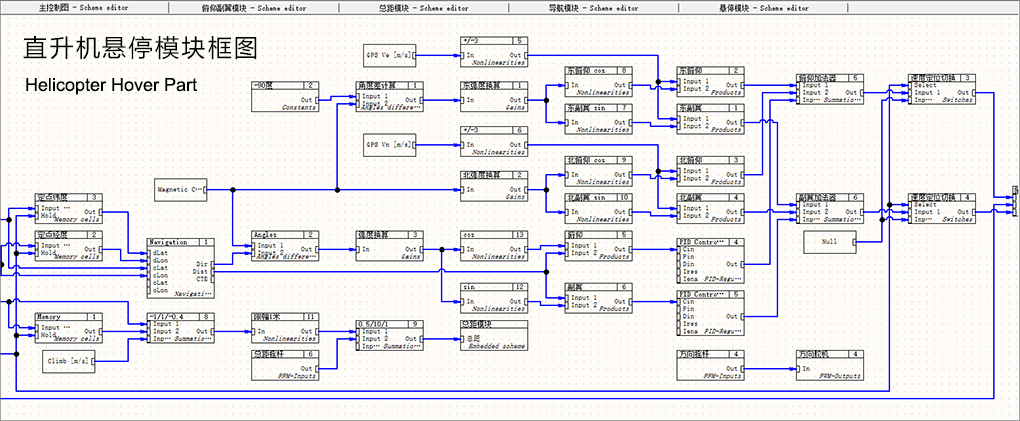
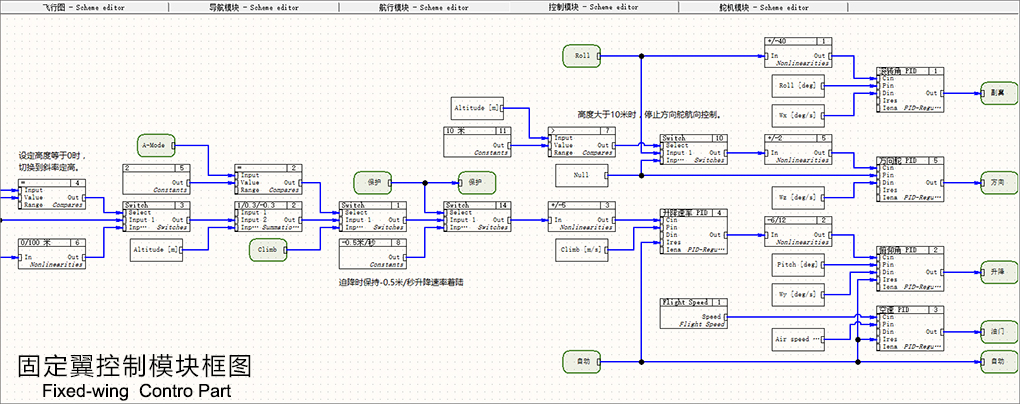
某固定翼完整控制律设计案例:
基于齐格勒―尼科尔斯法则的
PID 参数整定器:
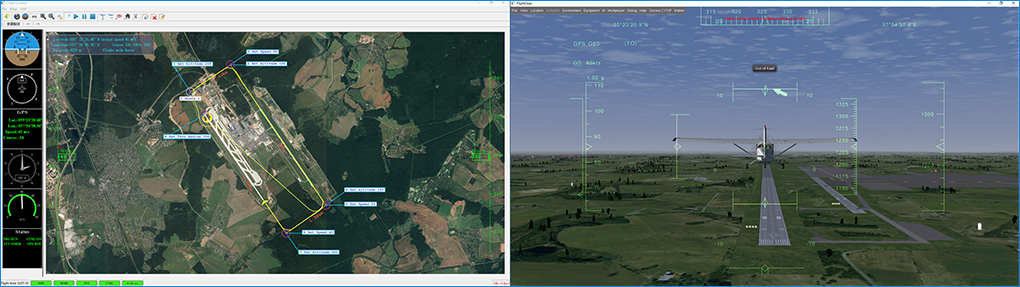
基于 JSBSim 飞行动力学模型和
FlightGear 飞行模拟器组成的半物理仿真系统:
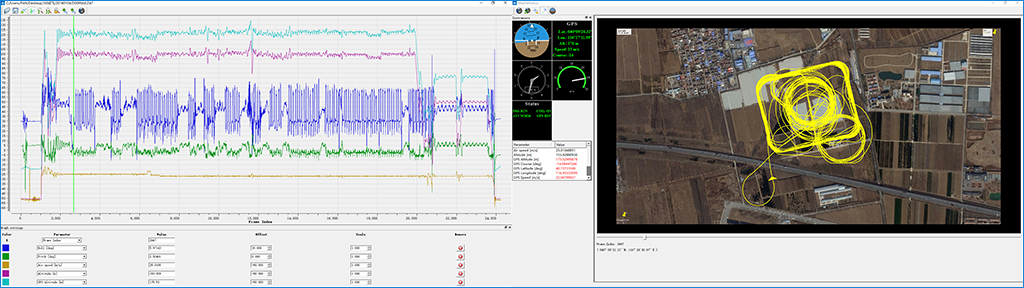
多功能专业飞行数据分析软件:
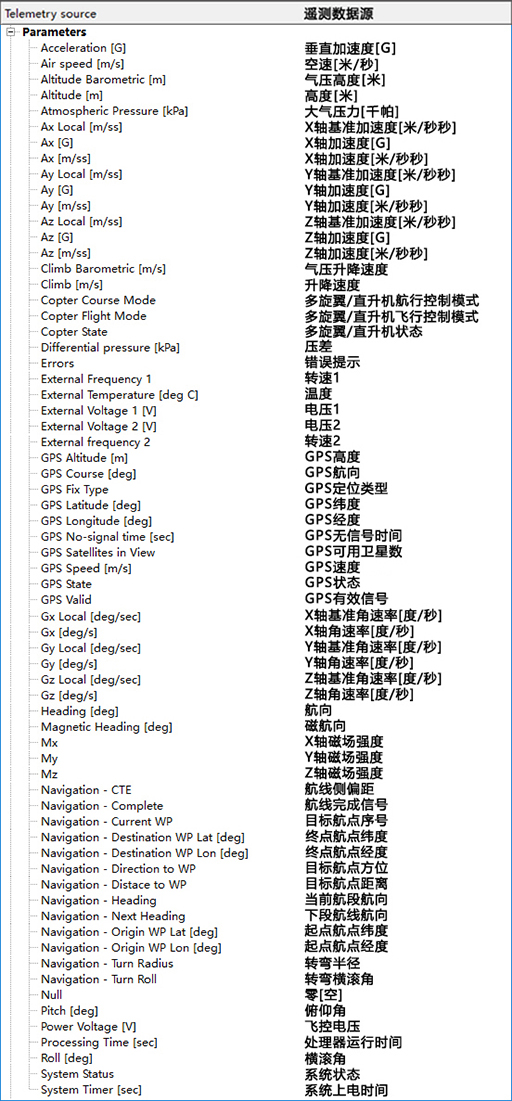
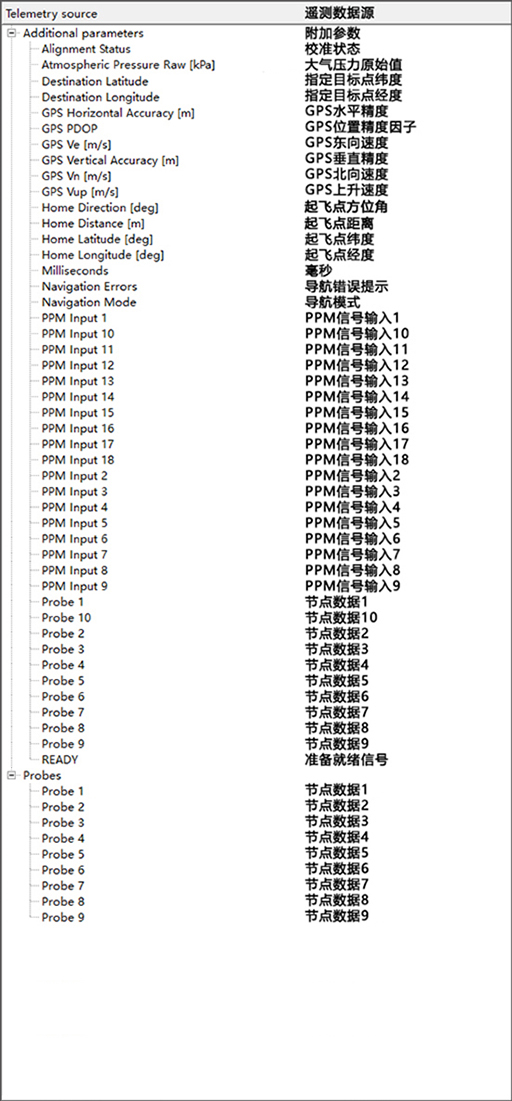
遥测数据源:
系统连接示意图:
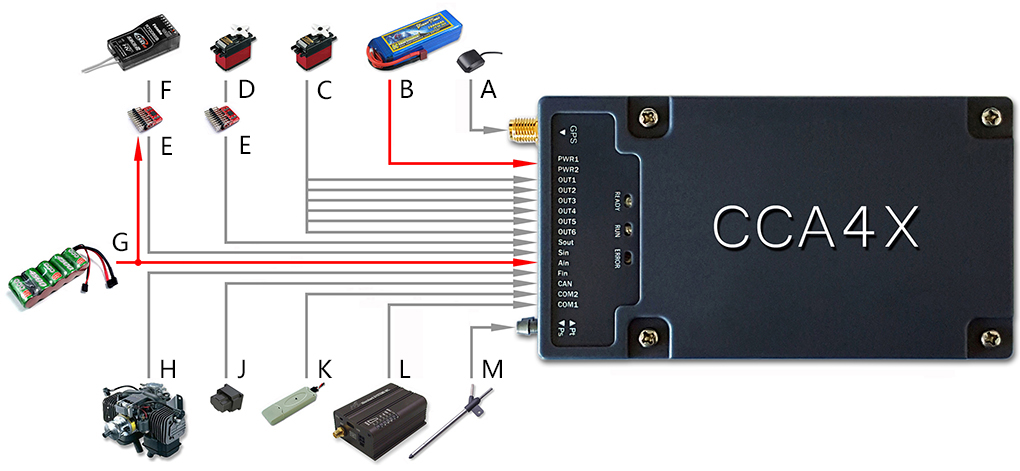
A.GPS天线、B.飞控电源、C.D舵机、E.SBUS_PPM_PWM转换器、F.遥控接收机、G.舵机电源、H.转速传感器、J.CAN总线传感器、K.飞行数据记录器、L.数传电台、M.空速管
。
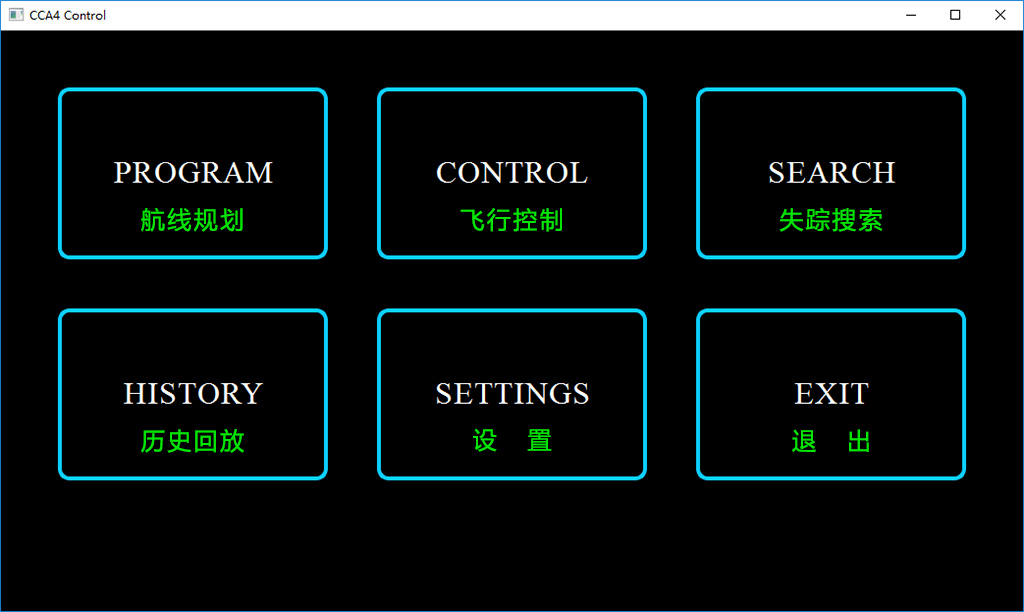
飞行控制软件 CCA Control
CCA42
飞行控制系统的地面飞行控制软件支持多种地图格式和在线地图,能够规划各种复杂的任务航线,可以个性化设置控制和显示方式、自定义添加控制按钮和交互窗口、方便灵活的实时航行控制、
一站多机控制、视频画面叠加功能、以及飞行历史回放、飞机失踪位置搜寻等功能。具有适应性广、通用性强、扩展性高、兼容性好的使用特点,系统硬件和控制软件可以一机多用,能够满足无人机种类和应用的多样化要求。
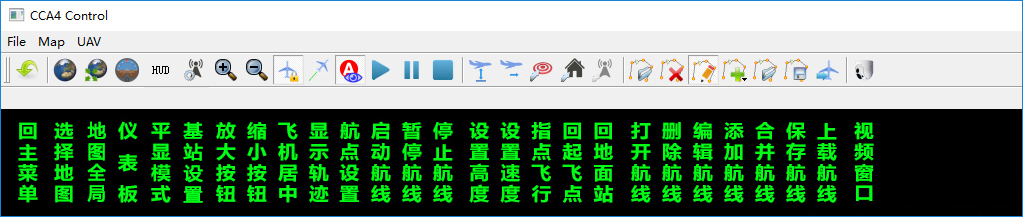
软件菜单:
设置菜单:

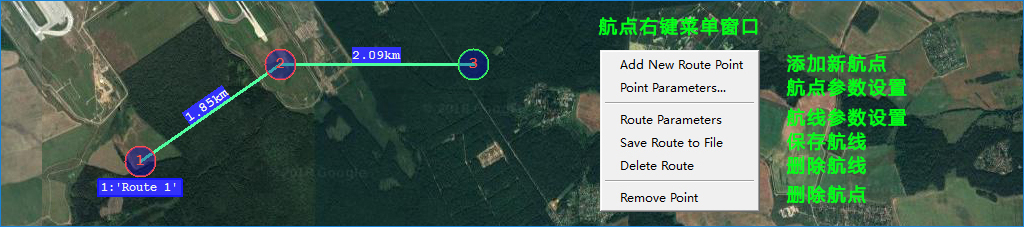
航线规划:使用鼠标右键航点菜单,
添加删除航点、设置航点参数和航线参数
。
航点菜单:
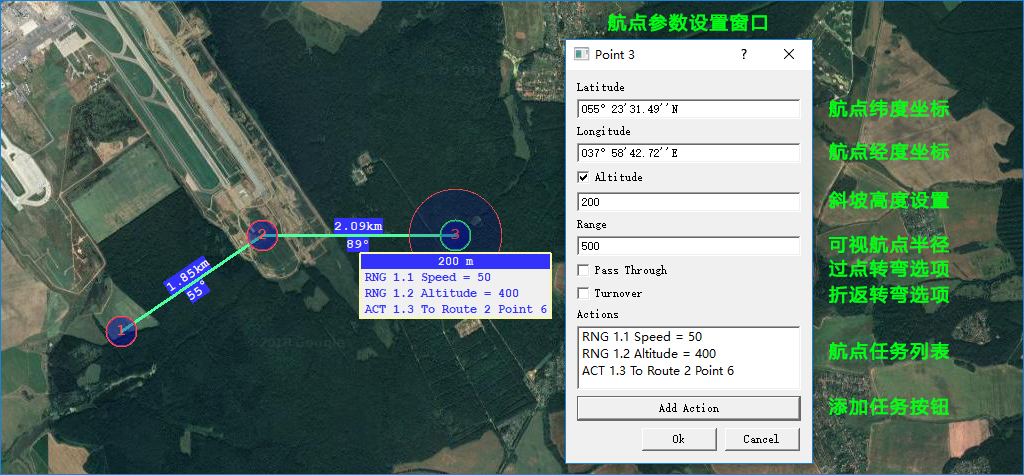
设置航点参数:
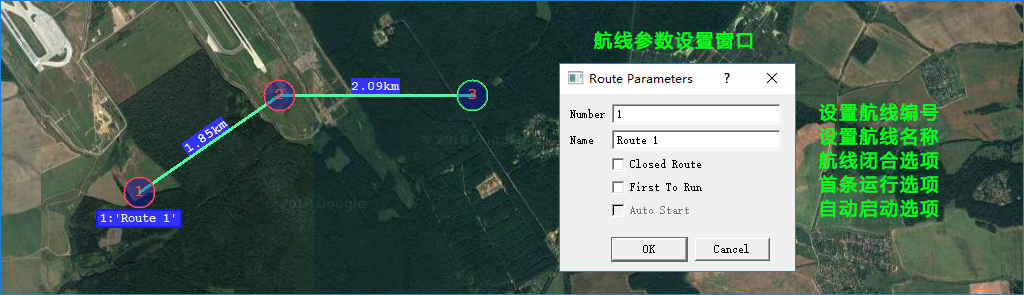
设置航线参数:
常规任务航线示例(最多可由100条航线组成):

扫描航线示例(最多可由100条航线组成):
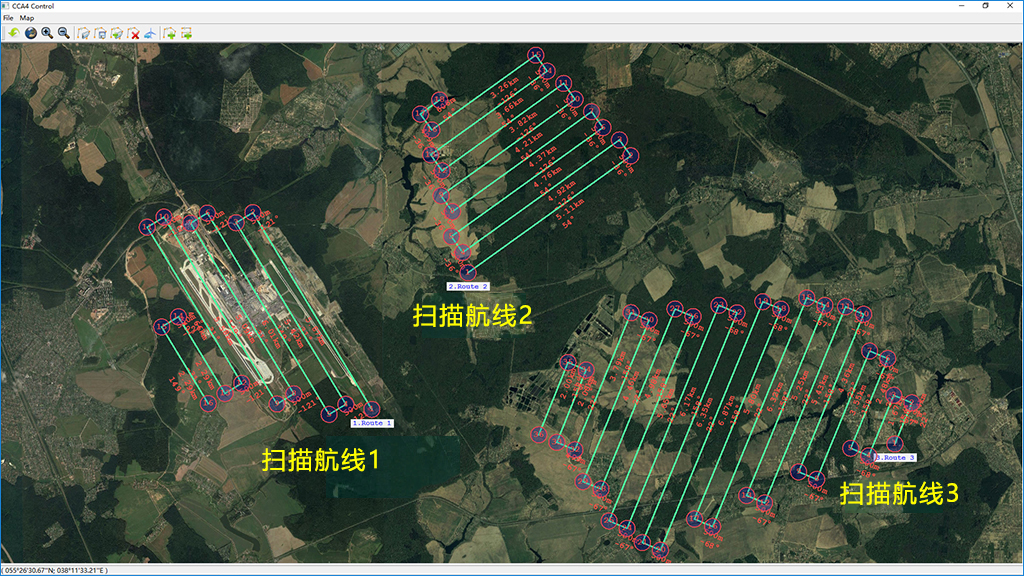
多边形扫描航线设置:
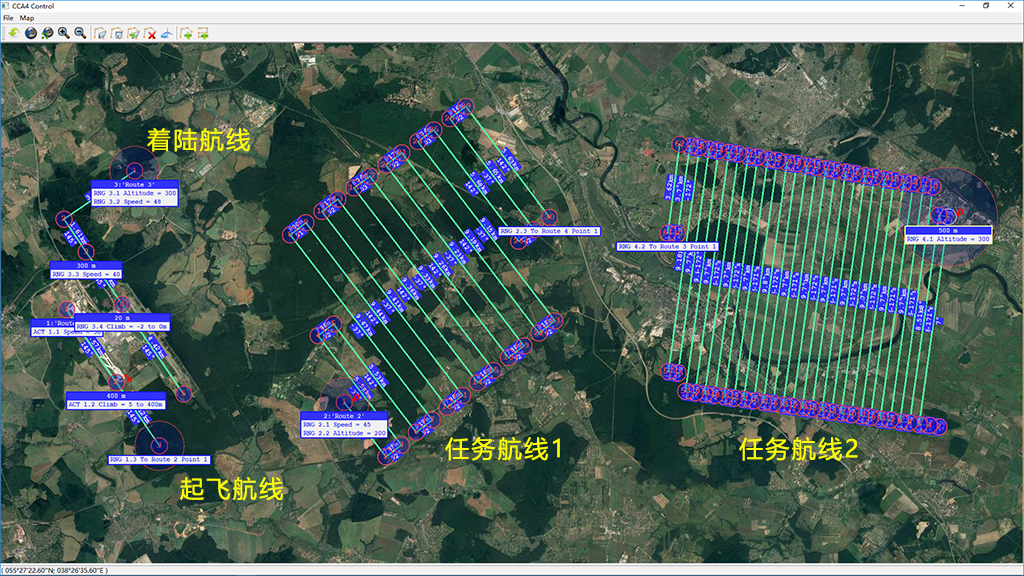
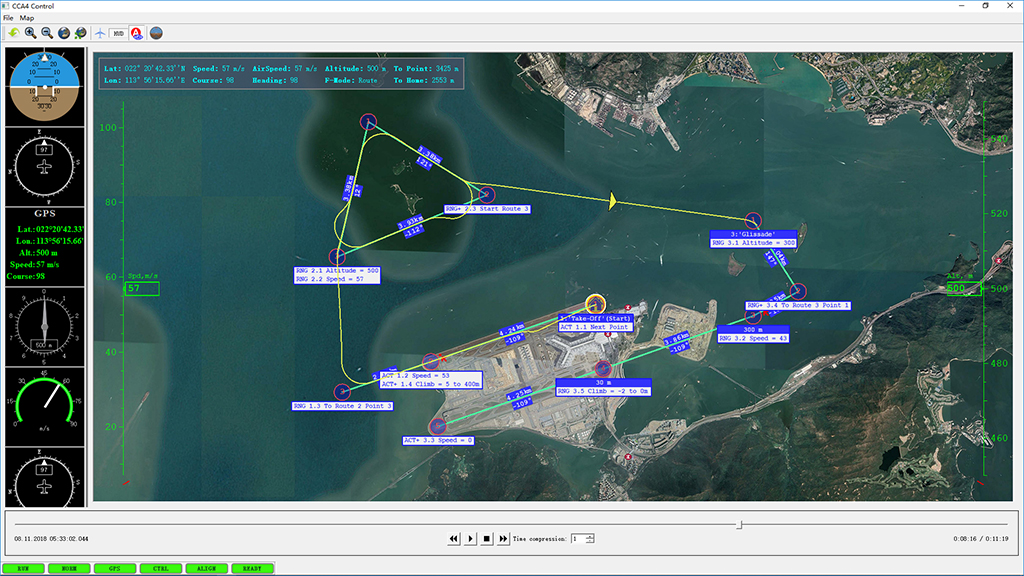
综合任务航线:
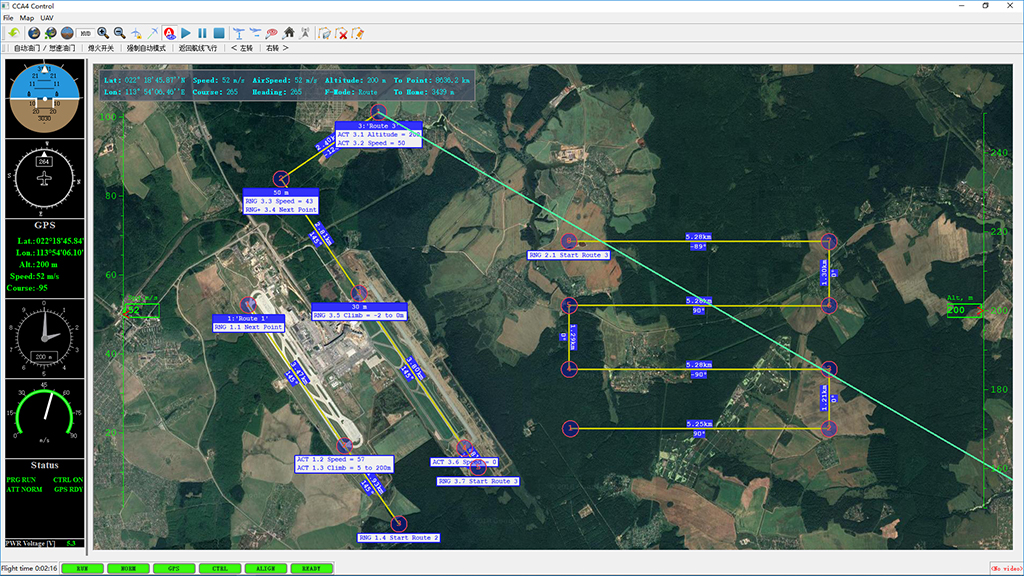
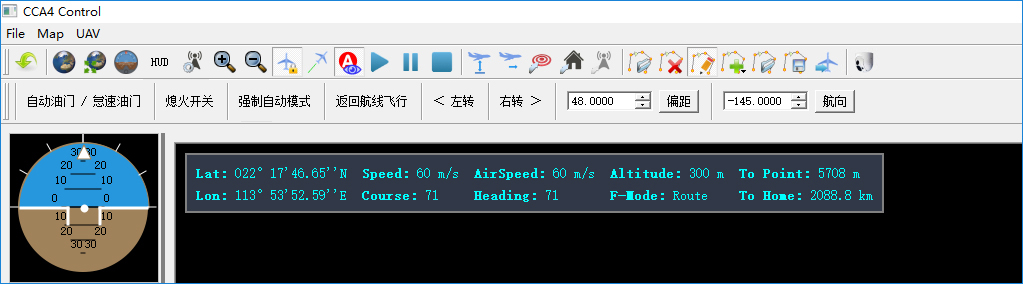
飞行控制界面:
快捷操作图标按钮:
自定义操作按钮和交互窗口:
失踪搜索界面:
飞行历史回放界面:
CCA4X 飞控在众多领域的应用:


























 |

